介绍
点云数据通过点提供非均匀覆盖,而光栅图像使用像素显示区域的完全覆盖。将点云转换为网格化的光栅,可以方便地使用包含大量信息的数据。使用FME,可以将点云转换为光栅,并通过调整像素分辨率或要显示的点云组件等因素自定义光栅图像。以下练习将逐步引导您完成不同的工作流,并解释如何在不同的点云到光栅转换场景中使用FME变压器。亚搏在线
1。点云到灰度光栅
下载
此工作流将亚搏在线重点使用名为“强度”的点云组件创建光栅输出。强度是一个定量指标的反射率的对象或如何“明亮”的返回是在点云数据收集。例如,植被具有较高的反射率,将返回高强度值,而路面或屋顶具有较低的反射率,将返回低强度值。如果我们只使用强度来可视化点云,我们可以创建灰度光栅。
- 添加点云文件激光阅读器使用默认参数。
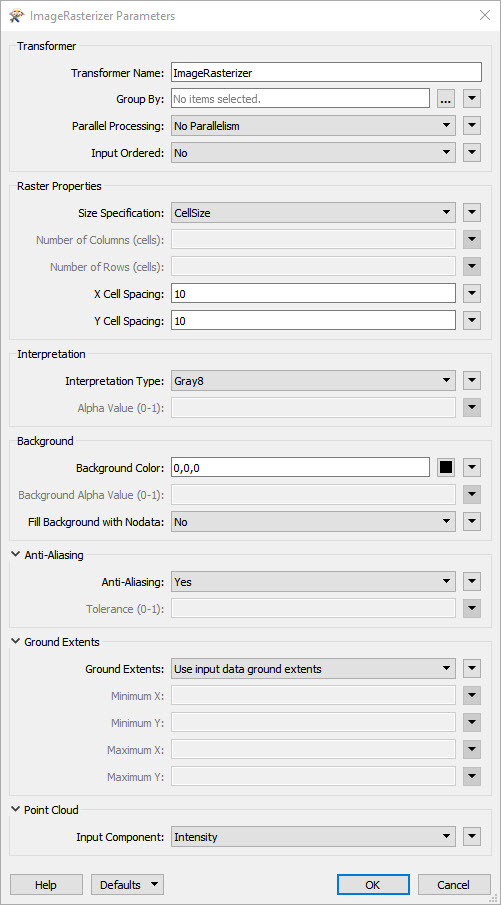
- 添加图像光栅化器变压器并将LAS读卡器连接到输入端口。应更改参数,以便:
- 尺寸规格:单元尺寸
- X单元格间距:10
- Y单元格间距:10
- 解释类型:灰色8
- 背景色:0,0,0
- 消除混叠:是
- 输入分量:强度
- 在这一点上,灰度光栅可以使用geotiff作家使用默认参数或更多变压器可以添加到工作流中,以进一步平滑光栅,如下面的步骤所示。亚搏在线
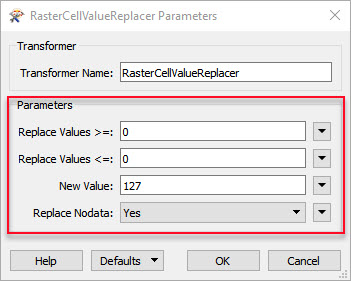
- 将光栅从图像光栅化器连接到RasterCellValue替换器转换并将参数更改为下图中显示的参数,其中“replace values>=”和“replace values<=”均设置为0,“新值”设置为127“,“替换节点数据”设置为“是”。这有助于消除光栅图像中的一些噪声。这种平滑算法的缺点是锐度降低,因为现在像素值之间的对比度较低,因为我们用127(深灰色)替换了值0(黑色)。平滑效果在有许多亮像素的区域效果较差,因为它们的值高于127,因此,这些“洞”与周围环境之间仍然存在明显的对比。
- 将上一个输出连接到随机采样将“尺寸规格”参数设置为“百分比”,百分比为101,将“插值类型”设置为“双三次”。
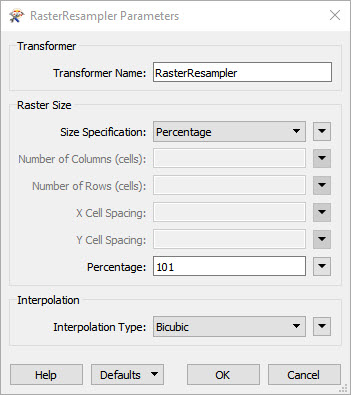
- 复制rasterresampler并将其粘贴到工作区中。将第二个rasterresampler的设置百分比从101更改为99.001,并将其连接到第一个rasterresampler变压器。
- 现在可以使用geotiff编写器使用默认参数编写平滑的光栅输出。将功能类型定义更改为“手动”。当新窗口出现时,将“压缩方法”更改为“压缩位”,将“光度解释”更改为“迷你黑”。



结果是灰度图像。下面,从左到右是源LAS文件,粗输出光栅,平滑的输出光栅



输出图像通常会有一些节点数据点,比如有一个水体的地方。在我们的例子中,由于点之间的距离大于光栅化间距,因此我们有一些节点数据点缺少覆盖。在下图中,您可以看到nodata的位置:

如果有许多这样的点,或者如果输出主要由nodata组成,考虑使用更大的光栅化间距,如20米而不是10米(间距在图像光栅化器中设置)。如果节点数据像素很少,尝试使用平滑算法,例如使用rasterresampler上下重采样,如上述步骤5-6所示。模板工作区。
2。点云到DEM光栅
下载
数字放大器使用Z坐标从点云生成DEM。只要指定的单元间距大于点覆盖范围内可能出现的不规则间隙,输出就会有效。由于点云数据的性质,这些差距非常频繁,因此,我们应该设置10米的大单元间距,以避免DEM覆盖范围内的节点孔。我们不能像在前一个例子中那样使用平滑处理,因为它会扭曲表面,使其看起来像是被陨石击中。
- 添加一个LAS读卡器。
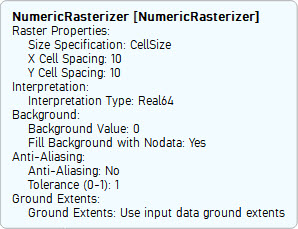
- 只需将LAS读卡器连接到数字转换器,即可创建光栅输出。下面的图片显示了在我们的示例中,numericroster所需的参数。将“大小规格”设置为“cellsize”,“x cell spacing”和“y cell spacing”分别为10和1。尝试将单元格间距从10更改为2,然后比较输出。您会发现2米的间距会产生许多空间:
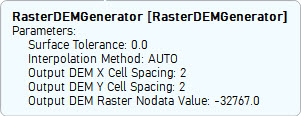
- 通过高程栅格化点云的更好选择是表面模型或Rasterdem发生器.两种变压器的使用方法相同,然而,SurfaceModeler具有生成轮廓或罐头等附加功能。我们已经选择在这个例子中使用RasterDemGenerator。RASTERDEMgenerator与numericroster生成相同的DEM,然而,它在引擎盖下有更多的智能,能够插入孔,即使有很小的间距也能提供更平滑的输出。在我们的示例中,RasterDemGenerator所需的参数如下图所示。“表面公差”设置为0.0,“输出DEM X单元间距”和“输出DEM Y单元间距”均设置为2。
- 使用功能缓存运行工作区,并检查NumericMaster和RasterDemGenerator的输出。


下图显示了原始点云,由数字衰减器产生的光栅(间隔10米)。以及RasterDemGenerator分别生成的光栅:



数据属性
- 第一个练习的数据来源于俄亥俄州地理参考信息计划.GIS支持中心为支持俄亥俄企业的商业数据集维护企业和站点许可证。
- 第二个练习的数据来源于西弗吉尼亚景观.他们是由AmericaView和美国地质勘探局赞助的。
我试过你的“情景11”。PC2Grayscale“附件
一切顺利,问题是,我想根据强度以颜色显示光栅…这是我对点云唯一的分类。
我应该在图像光栅跨音速设置中更改什么以获得颜色输出?
当做,
@海卡尔强度使灰度变大。如果您希望将彩色光栅作为输出,则需要将强度映射到RGB值。请将您的数据和工作区发送给我们的支持团队,他们将乐于提供进一步的帮助。https://support.亚搏在线safe.com/knowledgesubmitcase