介绍
收集点云数据集时,还为每个点收集了许多组件值。这可能包括颜色等信息,协调,高程,强度,和分类。尽管点云包含大量信息,有时候不需要全部拥有。只需处理一个大型数据集就可以分析其中的一种类型的特性,这不仅效率低下而且耗时。这个PointCloudSplitterTransformer可用于将点云中感兴趣的特征与其他点分离。
下面的示例演示如何在不同的场景中使用PointCloudSplitter。要进一步了解PointCloudSplitter,参观文档页.
按返回编号拆分
下载
收集点云数据时,一个激光点被发送到地球并反射回传感器。有时发送的一个激光脉冲会有多次返回。这些脉冲被计数并给出一个返回数。更多的反射面往往比不反射面有更多的返回。使用PointCloudSplitter,如何按返回分割点云有四个选项:返回,返回的数字,仅限首次返回,或仅最后一次返回。下面的步骤演示如何按返回分割点:
- 添加一个LAS ASPRS带默认参数的读卡器并添加点云数据
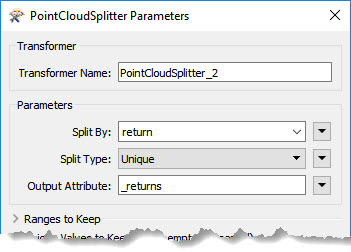
- 添加一个PointCloudSplitter.在参数中,将“split by”设置为“return”,“split type”到unique,“output attribute”到“_returns”。
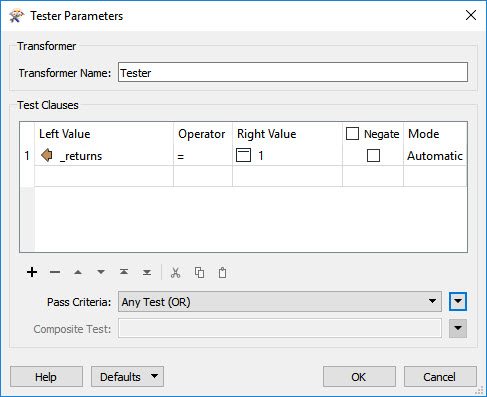
- 传感器最多可收集5次返回数据,所以我们现在加5个测试器变压器,每个连接到拆分输出端口。每个变压器将“左值”设置为“返回”,“operator”to=和“right value”作为1,2,三,4,或5。
- 通过测试仪传递的每个输出都可以在数据检查器中查看。


a. B.
B.
C. d.
d.
图像A在数据检查器中显示原始点云读取为LAS特征类型,而图像b,C.D先展示,第二个和第三个返回点。
按分类拆分
下载
如果您对一个或多个特性感兴趣,那么按类拆分点云非常有用。分类值根据标准ASPRS分类值进行分配。
因为这种类型的操作很常见,一名亚搏在线安全工作人员创建了一个简单的自定义转换器,名为点云类分类器使操作更加高效。它本质上是一个大型的测试过滤器,它被预先设置为知道要查找什么值。这意味着您不必像前一个示例中所做的那样手动添加和设置测试仪或测试滤波器变压器。使用此变压器的步骤如下:
- 添加一个LAS ASPRS带默认参数的读卡器并添加点云数据
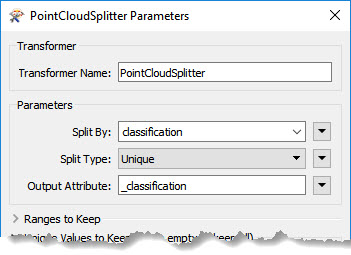
- 添加一个PointCloudSplitter.在参数中,将“split by”设置为“classification”,“拆分类型”为“唯一”,“输出属性”为“分类”。输出属性必须具有此名称,因为PointCloudLasClassifier设置为读取属性“_Classification”。
- 添加点云类分类器.因为这是一个定制的变压器,所以必须先安装它。这可以通过下载变压器(如上)来完成。然后双击它。安装后,您可以像添加任何转换器一样将其添加到工作区。
- 点云现在已经根据类被拆分,可以进一步操作,作为新的点云文件写入,或在数据检查器中查看。在模板文件中,检查员仅附在原始LAS文件中存在的类别上。如果您使用自己的LAS数据集,那么您可能有更多或更少的类。

a. B.
B.
C. d.
d.
图像A在数据检查器中显示原始点云读取为LAS特征类型,而图像B。显示分类为地面(2)的点,图像C显示分类为高植被(5)的点,和图像D。显示分类为建筑物(6)的点。
按等级和标高拆分
下载
下一个例子更复杂,因为我们将使用两个PointCloudSplitter和一个正射影像为生成的点云提供额外的颜色。根据你的需要,你可能只对某类点感兴趣,也可能对强度等其他成分感兴趣,高程,颜色,等。对颜色的进一步处理有助于区分不同或焦点区域。为了了解如何做到这一点,遵循以下步骤:
- 添加一个las-asprs阅读器使用默认参数并添加点云数据
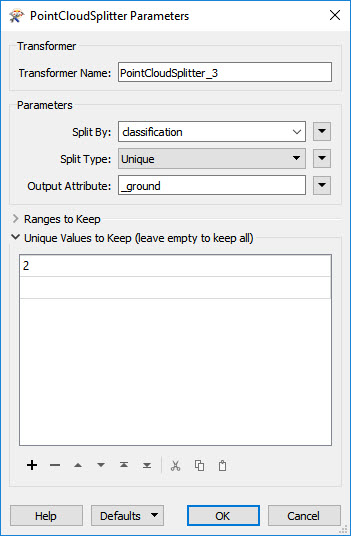
- 添加一个PointCloudSplitter转换并更改参数,使“拆分方式”设置为“分类”,“拆分类型”设置为“唯一”,“输出属性”设置为“接地”。在“要保留的唯一值”表中,添加值2,即地面的分类值。这将确保我们从这个变压器的唯一输出是接地点。
- 现在我们将按高程分割地面点。添加第二个PointCloudSplitter Transformer并将前一个拆分点连接到输入端口。更改参数,使“split by”设置为“z”,“拆分类型”设置为“范围”,“输出属性”设置为“_z”。Z分量表示高程。我们将地面点分为三类:从0到5,5到20,20到50。
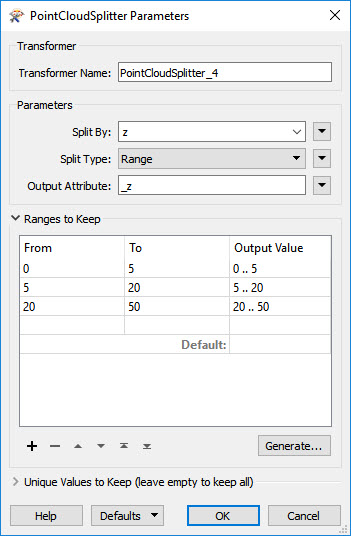
- 我们现在再加三个测试器变压器,每个连接到上一个输出。每个变压器将“左值”设置为“z”,“operator”to=和“right value”作为0..5,5…20,或20…50。
- 现在添加三个新的pointcloudonrastercomponentsetter变压器,每个测试仪一个。我们将首先关注低海拔范围的pointcloudonrastercomponentsetter。
- 在本例中,我们希望通过使用正射影像为这些点着色来突出显示低海拔范围。要做到这一点,将低海拔测试仪连接到PointCloud输入。
- 添加一个地理读者使用默认参数添加正射影像。将此读卡器附加到光栅输入。
- 现在在pointcloudonrastercomponentsetter,将组件设置为“颜色”。
- 我们现在将添加RasterrgbCreator公司转换并将其连接到中高海拔点cloudonrastercomponentsetter的光栅输入。
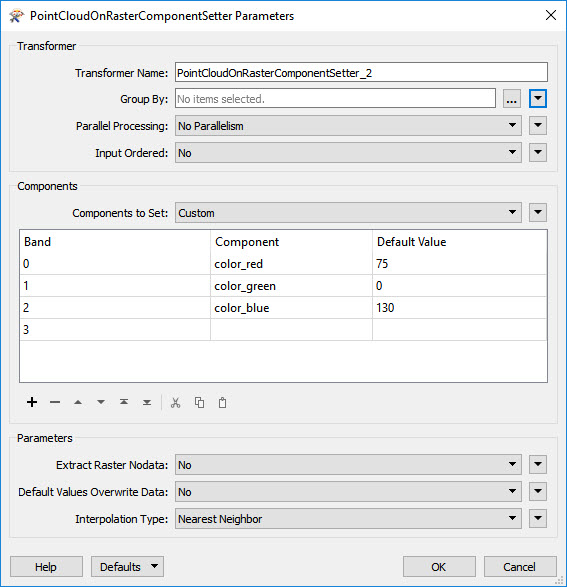
- 对于中高程点cloudonrastercomponentsetter,将中等高度测试仪输出连接到PointCloud输入端口。更改参数,使组件下有3个波段(0,1,2)组件颜色为红色,绿色,颜色分别为蓝色。将默认值更改为75,分别为0和130。
- 对于高海拔点cloudonrastercomponentsetter,将高海拔测试仪输出连接到PointCloud输入端口。更改参数,使组件下有3个波段(0,1,2)组件颜色为红色,绿色,颜色分别为蓝色。将默认值更改为25,分别为25和112。
- 把所有变化的点云放在一起,添加点云合并器.保留默认参数,并将pointcloudonrastercomponentsetter的三个pointcloud输出中的每一个连接到输入端口。现在可以使用编写器保存更改后的点云,也可以在数据检查器中查看输出。



a. B.
B.
C. d.
d.
图像A在数据检查器中显示原始点云读取为LAS特征类型,而图像B。显示地面分类点,Z值在0-5之间,这是通过使用两个点分云器变压器获得的。图像C显示同一区域的正射影像和图像D。显示地面分类点上颜色操作的结果。
要了解有关更改点云颜色的更多信息,请看我们的文章彩色和点云.
数据属性
- 此处使用的数据源于温哥华市,不列颠哥伦比亚省。它包含根据开放政府许可证(温哥华)获得许可的信息。
{kind=link}