Introduction
When point cloud datasets are collected,a number of component values are collected for each point as well.This can include information like color,coordinates,elevation,intensity,and classification.Although point clouds contain a large amount of information,sometimes there is no need to have it all.Having to process a large dataset just to analyze a single type of feature within it is inefficient and time consuming.ThePointCloudSplittertransformer is useful for dissociating the features of interest in the point cloud from the rest of the points.
The examples below demonstrate how the PointCloudSplitter can be used in different scenarios.To learn more about the PointCloudSplitter,visit thedocumentation page.
Splitting by Return Number
Downloads
When point cloud data is collected,a laser point is sent towards the earth and reflected back towards the sensor.Sometimes there are multiple returns for the one laser pulse that is sent.These pulses are counted and given a return number.More reflective surfaces tend to have more returns than non-reflective surfaces.With the PointCloudSplitter,there are four options for how to split a point cloud by return: return,number_of_returns,First Return Only,or Last Return Only.The steps below demonstrate how to split the points by return:
- Add anLAS ASPRSreader with default parameters and add the point cloud data
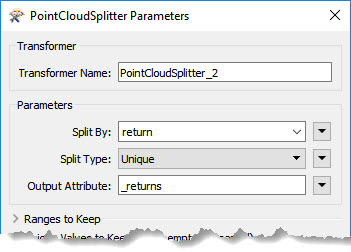
- Add aPointCloudSplitter.In the parameters,set "Split By" to "return","Split Type" to Unique and "Output Attribute" to "_returns".
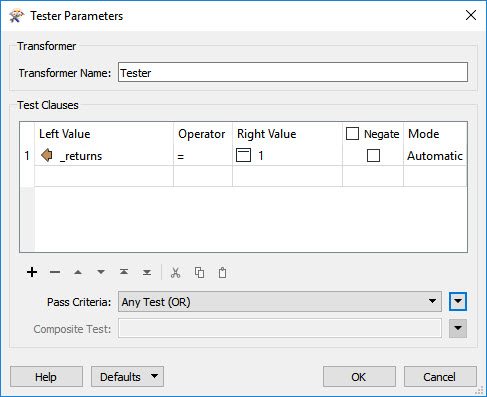
- A maximum of 5 returns will be collected by a sensor,so we will now add 5Testertransformers,each connected to the Split output port.Each transformer will have the "Left Value" set to "_returns","Operator" to = and "Right Value" as either 1,2,3,4,or 5.
- Each output passed through the Testers can be viewed in the Data Inspector.


a. b.
b.
c. d.
d.
Image a.shows original point cloud read as an LAS feature type in the Data Inspector while images b.,c.,and d.show the first,second and third return points respectively.
Splitting by Classification
Downloads
Splitting a point cloud by class can be very useful if you are interested in a one or many features.The classification values are assigned based on the standard ASPRS classification values.
Since this type of operation is common,a 亚搏在线Safe staff member created a simple custom transformer calledPointCloudLASClassifierto make the operation even more efficient.It is essentially one large TestFilter that is preset to know what values to look for.This means you will not have to manually add and set up Tester or TestFilter transformers as was done in the previous example.The steps to use this transformer are as follows:
- Add anLAS ASPRSreader with default parameters and add the point cloud data
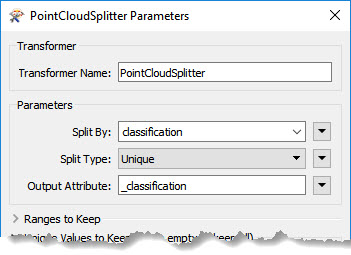
- Add aPointCloudSplitter.In the parameters,set "Split By" to "classification","Split Type" to Unique and "Output Attribute" to "_classification".The Output Attribute must have this name because the PointCloudLASClassifer is set up to read the attribute "_classification".
- Add thePointCloudLASClassifier.Since this is a custom transformer it will have to be installed first.This can be done by downloading the transformer (above),and double-clicking it.After the installation,you will be able to add it to the workspace like you would any transformer.
- The point cloud has now been split according to class and can be further manipulated,written as a new point cloud file,or viewed in the Data Inspector.In the template file,inspectors are only attached to the classes that exist in the original LAS file.If you are using your own LAS dataset you may have more or fewer classes.

a. b.
b.
c. d.
d.
Image a.shows the original point cloud read as an LAS feature type in the Data Inspector while image b.shows the points classified as ground (2),image c.shows the points classified as high vegetation (5),and image d.shows the points classified as buildings (6).
Splitting by Class and Elevation
Downloads
This next example is more complex as we will be using two PointCloudSplitter's and an orthophoto to provide additional colouring to the resulting point cloud.Depending on your needs,you may be interested in only a certain class of points as well as another components like intensity,elevation,colour,etc.Further manipulation of colour can help to distinguish differences or areas of focus.To learn how this can be done,follow the steps below:
- Add anLAS ASPRS readerwith default parameters and add the point cloud data
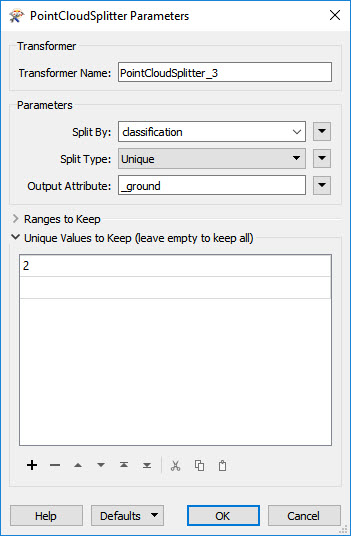
- Add aPointCloudSplittertransformer and change the parameters so that "Split By" is set to "classification","Split Type" is set to "Unique" and "Output Attribute" is set to "_ground".In the "Unique Values to Keep" table,add the value 2 which is the classification value for the ground.This will ensure that our only output from this transformer are ground points.
- We will now split the ground points that we found by elevation.Add a second PointCloudSplitter transformer and connect the previous split points to the input port.Change the parameters so that "Split By" is set to "z","Split Type" is set to "Range" and "Output Attribute" is set to "_z".The z component represents elevation.We will split the ground points into three categories: from 0 to 5,5 to 20,and 20 to 50.
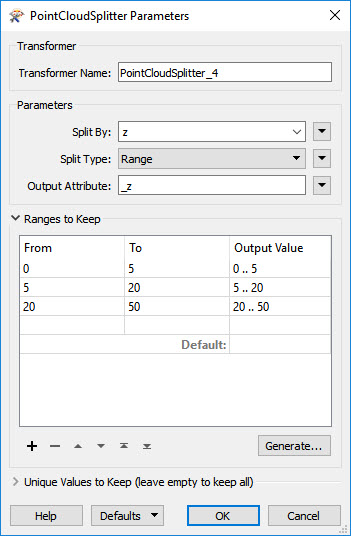
- We will now add threeTestertransformers,each connected to the previous output.Each transformer will have the "Left Value" set to "_z","Operator" to = and "Right Value" as either 0..5,5..20,or 20..50.
- Now add three newPointCloudOnRasterComponentSettertransformers,one for each Tester.We will focus on the PointCloudOnRasterComponentSetter for the low elevation range first.
- In this example we would like to highlight the low elevation range by using an orthophoto to colour these points.To do this,attach the low elevation tester to the PointCloud input.
- Add aGeoTIFF readerwith default parameters to add the orthophoto.Attach this reader to the Raster input.
- Now in thePointCloudOnRasterComponentSetter,change the Components as being set to "Color".
- We will now add theRasterRGBCreatortransformer and connect this to the Raster input for both the medium and high elevation PointCloudOnRasterComponentSetters.
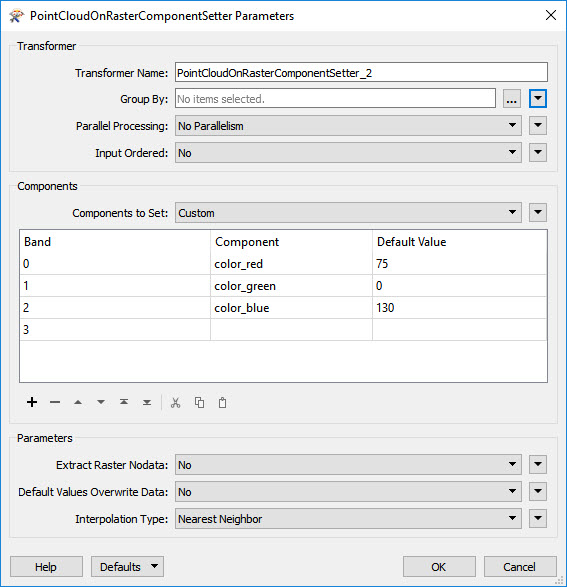
- For the medium elevation PointCloudOnRasterComponentSetter,connect the medium elevation Tester output to the PointCloud input port.Change the parameters so that under Components there are 3 bands (0,1,and 2) with Components color_red,color_green,and color_blue respectively.Change the Default Values to 75,0 and 130 respectively.
- For the high elevation PointCloudOnRasterComponentSetter,connect the high elevation Tester output to the PointCloud input port.Change the parameters so that under Components there are 3 bands (0,1,and 2) with Components color_red,color_green,and color_blue respectively.Change the Default Values to 25,25 and 112 respectively.
- To put all the changed point clouds together,add thePointCloudCombiner.Keep the default parameters and connect each of the three PointCloud outputs from the PointCloudOnRasterComponentSetters to the input port.You can now use a writer to save the altered point cloud or you can view the output in the Data Inspector.



a. b.
b.
c. d.
d.
Image a.shows the original point cloud read as an LAS feature type in the Data Inspector while image b.shows the ground classified points with z values ranging from 0-5 which were obtained by using two PointCloudSplitter transformers.Image c.shows what the orthophoto of the same area looks like and image d.shows what the result of colour manipulation looks like on the ground classification points.
To learn more about change point cloud colours,please visit our articleColour and Point Clouds.
Data Attribution
- The data used here originates from open data made available by theCity of Vancouver,British Columbia.It contains information licensed under the Open Government License - Vancouver.
{kind=link}
Thanks - perfect,
just recently returned to FME (2 years off) and point clouds from airborne lidar (10 years off :) and needed this one.Combining with PointCloudComponentAdder (adding colours) and Imagerasterizer to visualize extent of 2 distinct pointclasses in a dataset from Optech Titan scanner (ground and riverbed).Very handy.
pH