- Previous: Point Cloud to 3D Terrain Model with Buildings
- 当前:从三维模型或光栅数据创建点云
点云创建简介
While you may already be familiar with LiDAR-derived point clouds and FME's ability to quickly translate point cloud data,您可能不知道FME也可以从其他几何图形创建点云。This kind of translation can be useful if you wish to perform operations or create a model not supported in your original format.在下面的演示中,we show how 3D models (like Sketchup) and rasters (like DEMs or RGB images) can be rendered into point clouds.
本文要强调的变压器是点云合并器,which can output a single point cloud from input geometries.我们将在下面的每个示例中更详细地了解它的用途。
下载
示例1:三维模型到点云
工作区模板:3dmodel2pointcloud.fmwt
在这个例子中,这个点云合并器 Transformer用于将三维特征从SketchUp模型转换为点云。Open the workspace template to see the finished 亚搏在线workflow,或者按照以下步骤创建自己的三维模型到点云工作流。亚搏在线
Step 1.读取源三维模型
为源三维模型添加SketchUp阅读器。Inspect the data so you get a sense of what you're working with.

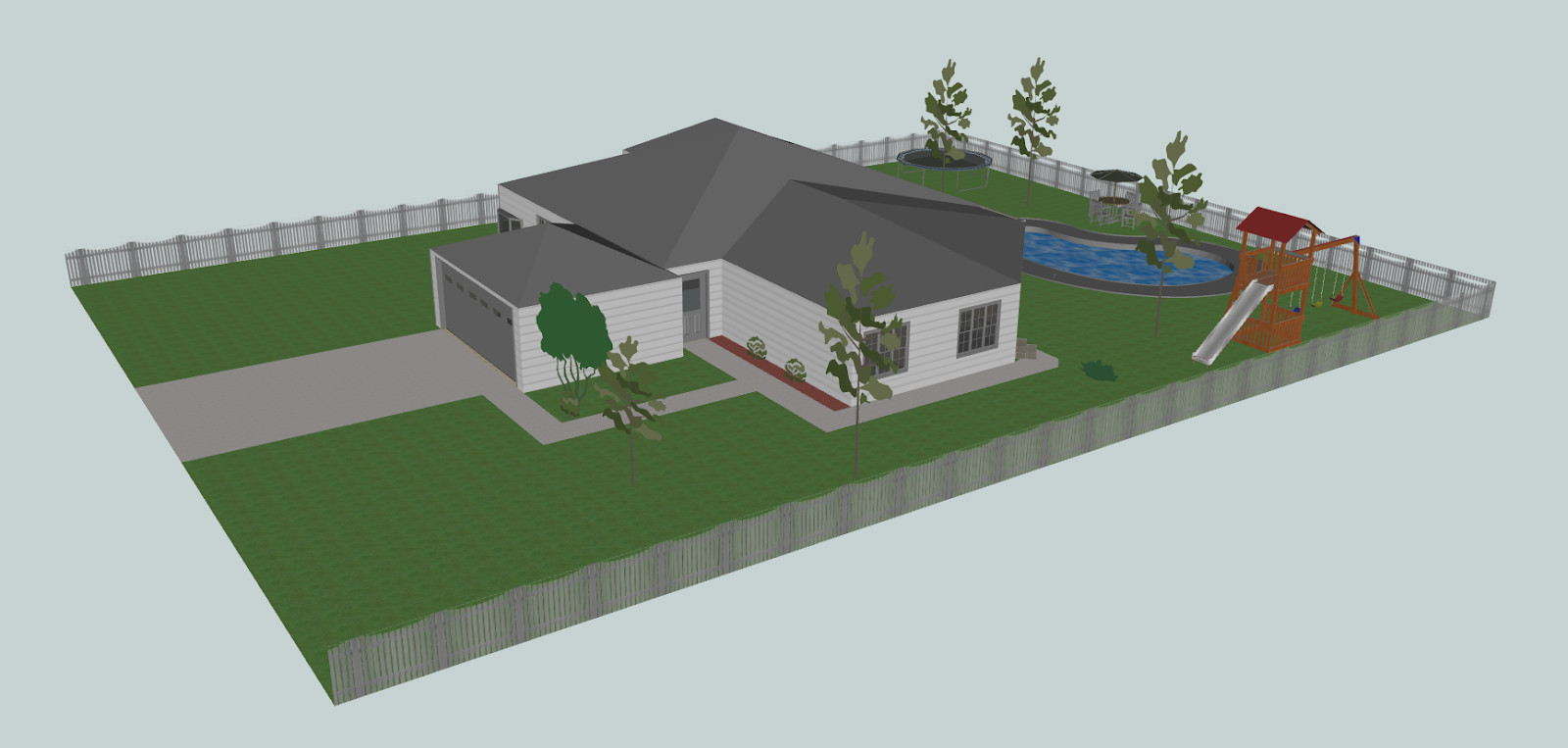
下面是工作区模板中包含的SketchUp模型:
步骤2。将整个模型转换为三维点云
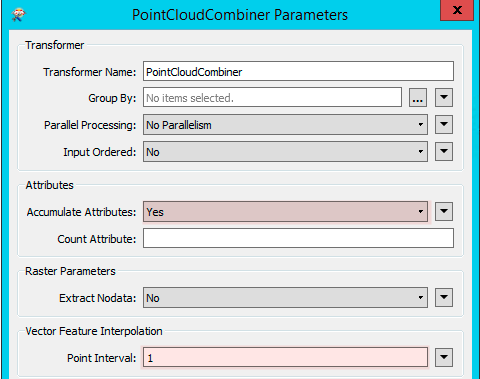
这个点云合并器is used to convert the entire model to a point cloud.这是工作区模板中的上书签。The default settings can be used in this case as we simply want to accumulate similar attributes and space our output points at 1 unit intervals.改变Point Interval中的参数点云合并器会对处理时间产生巨大影响,但如果需要,也可以提供更细粒度的插值。
Please Note:运行提供的工作区时,您可能会看到以下错误:
|警告为网格创建提供的间距参数将产生大量点,考虑增加间距
此警告旨在提醒您,使用当前设置运行计算机可能需要一段时间。如果你发现时间太长,simply adjust thePoint Interval参数为较大的数字,然后重试!
Step 3.将三维模型的一部分转换为三维点云
这个Deaggregator 和测试器变形金刚可以用来提取特定的特征,以便转换为点云。构成聚合SketchUp模型的每个部分都有一个_part_numberattribute that acts like a unique identifier.对于模板中提供的模型,一_part_number在7个过滤器中,有一个过滤掉了摆动装置,which we can output as an individual point cloud feature,显示在工作区模板的下书签中。
以下是完整工作区的外观:
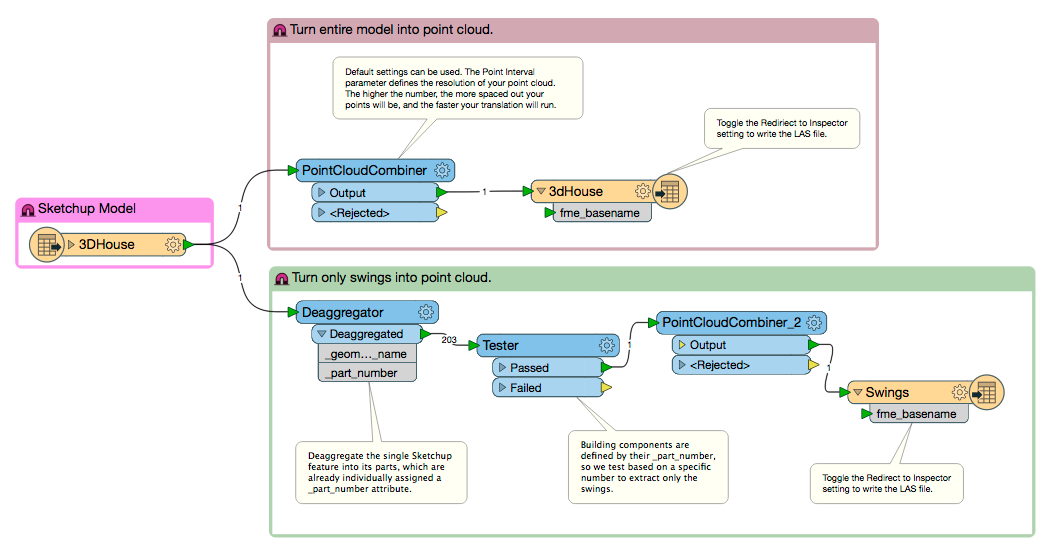
以下是工作区下部的回转集输出:

我们成功地将三维草图模型转换为点云,并演示了如何以点云的形式隔离源模型的特定部分。When you run the workspace,你会注意到LAS的作者Redirect to Inspector,causing the Inspector to open and display the results immediately after the translation has completed.当重复测试高度可视的工作流时,这可能是一个有用的设置,亚搏在线或者在处理要可视化的输出时。除了通过“编写器”菜单栏切换此设置之外,there are a few other ways to modify this setting,which you can read more abouthere.
Example 2: Rasters to Point Cloud
工作区模板:Raster2点cloud.fmt
RGB和数字光栅和点云转换
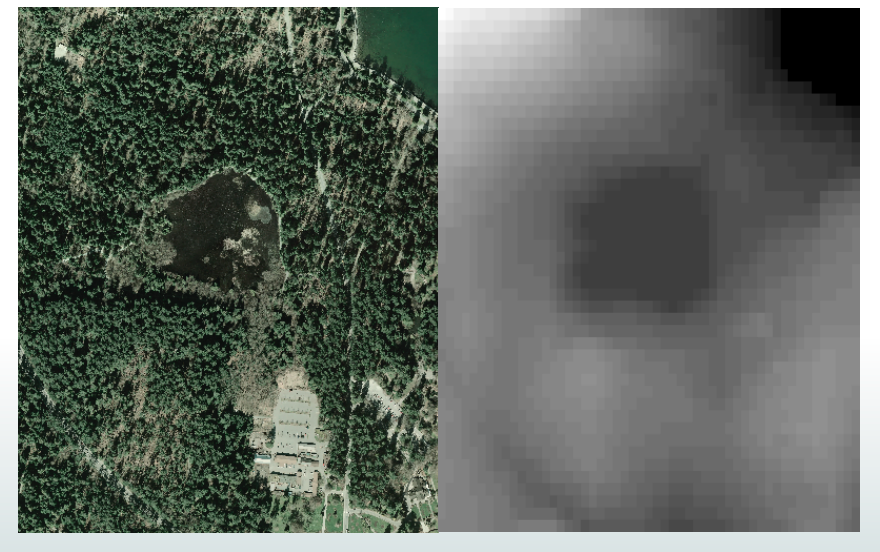
在下一个示例中,we'll look at transforming and combining two different kinds of rasters using point clouds.如果您的翻译操作或输出不能以光栅格式本地执行,则光栅到点云转换非常有用。as is the case with the unique coloured和下面我们将结合Airphoto(RGB光栅)和Digital Elevation Model(DEM数字光栅)创建提升图像。我们的输出将是三点云“层”,代表一个航空照片,a DEM,以及由两个光栅组合而成的航空照片的三维视图。
将RGB光栅转换为点云
类似于我们上面使用的3D模型,将RGB光栅转换为点云也可以使用点云合并器变压器。The point cloud will have组件对于每个光栅带(例如红色,绿色,and Blue).Since our RGB raster does not include any height (z-value) information,it will not have a Z component as a point cloud and will be flat.我们创建模型的这一步是严格的二维:我们最终结果的三维信息将来自DEM光栅,我们将在下一步看到它。
将数字光栅转换为点云
将数字光栅(DEM)转换为点云点云合并器transformer will create an elevated point cloud (a point cloud with a z component) and no other components.与将RGB光栅转换为点云相比,这只是一个三维转换。
亚搏在线
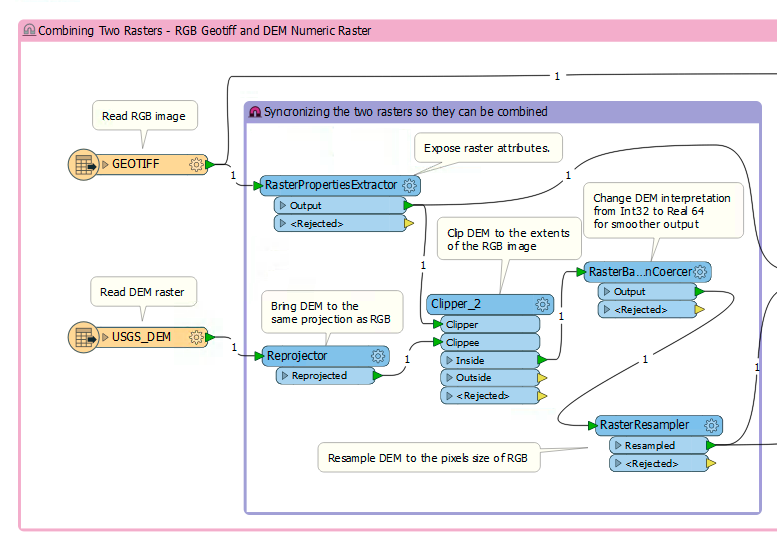
In the following example,an RGB Geotiff raster airphoto is combined with a DEM numeric raster to create a coloured and elevated point cloud,effectively combining 2D colour and 3D elevation components into a single point cloud.打开上面的工作区模板进行后续操作。
Step 1.读取和同步光栅图像
第一系列步骤将两个光栅同步到同一坐标系中,范围,and resolution so they can be combined into a four band raster R,G,B,Z (see the first bookmark and transformer annotations in the workspace).
这是工作区的第一部分,如果将两个光栅设置为组合:
步骤2。Combine Input Rasters Into One Image
After the two rasters are brought to the same size in pixels,这个RasterExpressionEvaluator combines them together into a four-band raster consisting of R,G,B and Z.
The band expressions used in theRasterExpressionEvaluatorlook like this:

可以从下表中复制和粘贴值:
| 解释 | Expression | 来源 |
| ReD8 | A[0] | First band from Geotiff |
| Green8 | A〔1〕 | Second band from Geotiff |
| Blue8 | A[2] | 来自geotiff的第三个乐队 |
| 英特32 | B〔0〕 | DEM的第一个波段 |
These expressions tell the transformer to take the first three bands from the three bands in the Geotiff raster (A),然后从DEM(B)中取出第一个波段,它将成为第四个波段。Also note that the Mode is set to Two Rasters in this situation because we want to merge two separate rasters into one new multiband raster.创建的图像无法写入大多数格式,但可用于在最后一步创建点云。
Step 3.将4波段图像转换为三维点云
最后点云合并器transformer is used with aPoint Interval其中1个生成输出点云,点之间的间距为1米。此转换器只将每个光栅的值强制为点云。The output shown below is a point cloud with four components: R,G,B and Z.The output is therefore coloured and elevated.

包扎
通过一些微妙的数据操作,这两个演示演示了将带有3D组件的数据转换为点云的过程。这个点云合并器是这个过程的明星-诀窍是在进入变压器之前设置数据,之后再使用点云。
数据属性
这篇文章真的很老,我是在2010年或2011年写的,当时我们刚刚添加了点云支持。
在FME中不需要对3D模型中的点进行着色-它们会自动获得颜色,either from colors set on geometries or from textures.The quality of the conversion depends on the point interval parameter.Higher interval means coarser point clouds with less points,lower interval gives a smoother model,but the volumes go up - it's up to the users to decide what they prefer.Processing billions of points is a typical and frequent goal for FME.
我不太确定你提到的插件——FME是一个独立的数据转换产品,几乎可以使用任何空间或非空间格式。它的主要目的不是数据可视化。Our visualization tool,数据检查员,gives in-depth information about geometries,attributes,和组件,基本上没有其他工具可以提供更多信息,but we do not concentrate on multitude of visual effects.
德米特里