介绍
在创建模型或处理点云之前,可能有必要了解数据集中点的密度。点云密度是数据分辨率的一个指标:密度越高表示信息越多(高分辨率),密度越低表示信息越少(低分辨率)。了解点云密度是很重要的,因为它可能会影响未来基于点云的项目的质量或准确性,例如创建DEM的项目。向涉众客户报告这些信息可能也很重要。
为了快速获取信息并以栅格格式显示,我们创建了一个名为PointCloudDensityCalculator的自定义转换器。只需将其连接到您的点云数据集并获得结果。下面,我们将描述这个转换器的内部工作原理,以帮助您准确理解正在进行的处理和分析的类型。下面还有一个示例演示工作区,它描述了如何向密度栅格输出添加颜色,从而为数据提供更多的含义和定义。
PointCloudDensityCalculator
下载
下面的一系列步骤描述了定制PointCloudDensityCalculator的每个部分,以及它是如何生成的。用户不需要重新创建它,因为他们可以简单地下载并安装要使用的转换器。然而,如果你对内部工作感兴趣或者想了解a定制变压器可以了,这些步骤对你很有用。如果您想为这个转换器打开工作区,而不只是安装它,您必须右键单击该文件并选择在FME工作台中编辑该文件。另外,如果已经安装了转换器,可以将其添加到工作区,右键点击它,并选择“编辑”。
定制变压器
- 要开始创建自定义转换器,点击FME工作台菜单栏中的“变形金刚”,选择“变形金刚”创建自定义的变压器”。这将提示您在一个新窗口中输入有关转换器的信息。输入信息后,转换器的输入和输出将被添加到工作区。将输入的名称更改为“POINT_CLOUD”,将输出的名称更改为“光栅”。
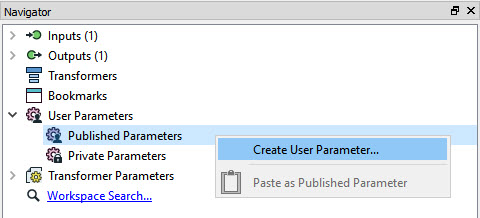
- 在添加任何转换器之前,我们将创建一个新参数。右键单击导航窗口“用户参数”下的“已发布参数”,并选择“创建用户参数……”
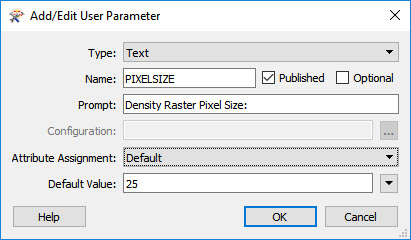
- 在“添加/编辑用户参数”窗口中,输入“PIXELSIZE”作为名称,“密度栅格像素大小:”为提示符,默认值为25。取消选中可选框。
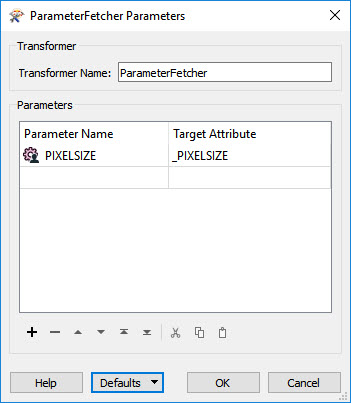
- 一个ParameterFetcher现在连接到输入变压器。将参数更改为“PIXELSIZE”,目标属性设置为_PIXELSIZE。这将获取在“密度光栅像素大小”下的变压器参数中设置的值,并将其用于下一个变压器的计算。
- 现在一个BoundsExtractor连接,以确定X的最小值和最大值,Y和Z属性。
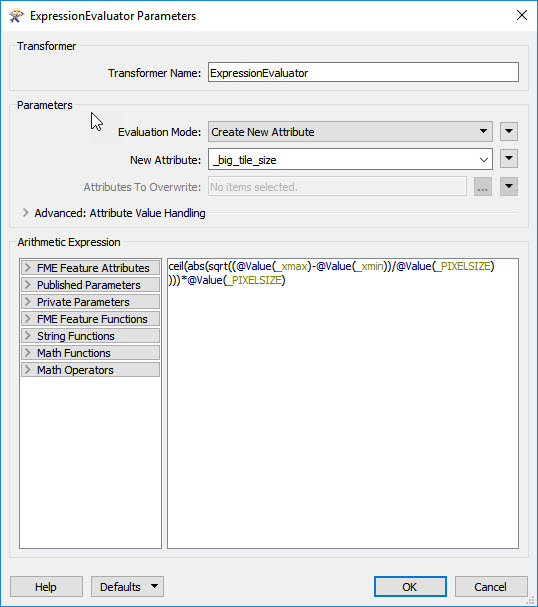
- 一个ExpressionEvaluator现在可以根据提取的绑定值和前面创建的PIXELSIZE参数计算名为“_big_tile_size”的新属性的值。用来做这个的算术表达式是:
装天花板(abs (√(@ value (_xmax) @ value (_xmin)) / @ value (_PIXELSIZE)))) * @ value (_PIXELSIZE)
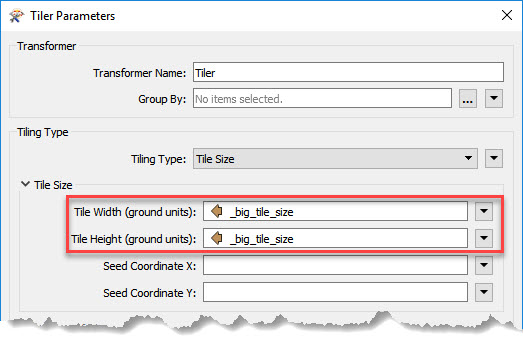
- 一个砖瓦匠用于平铺点云。我们将使用两个分蘖来减少所使用的处理内存。这是通过使用第一个平铺块来计算大的平铺块,然后将其缩小到指定的像素大小值,而不是直接创建小的平铺块来实现的。这将基于刚刚创建的属性“_big_tile_size”来完成。在参数中设置“_big_tile_size”作为Tile的宽度和高度。
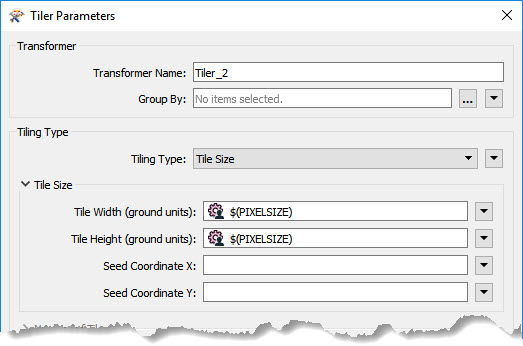
- 现在,我们将使用第二个Tiler创建用户指定大小的tile。将参数中的平铺宽度和高度设置为用户参数“PIXELSIZE”。
下面的图像显示了仅使用基于“PIXELSIZE”的Tiler与同时使用“PIXELSIZE”Tiler和“_big_tile_size”Tiler处理内存之间的差异。虽然当你只使用一个磁砖时,处理时间会更快,当您使用设置为两层的tiler时,处理内存使用量减少了72%。如果用户定义的像素大小非常小,而点云的面积非常大,这一点特别有用。
使用两个分蘖与像素大小25

使用一个瓷砖与像素大小25
- 一个PointCloudPropertyExtractor现在连接到计算每个tile中有多少个点。这个转换器自动创建一个名为“_num_points”的新属性列来记录点的数量。
- 现在瓷砖将被替换为一个盒子使用BoundingBoxReplacer。
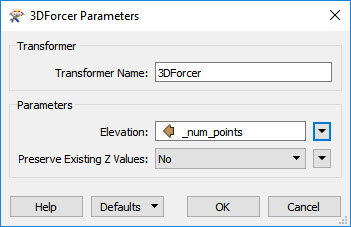
- 一个3 dforcer连接到“Box”输出,以通过tile中的点的数量(_num_points)提高tile的标高。这意味着点多的瓦片(点的密度更高)要比点少的瓦片高。
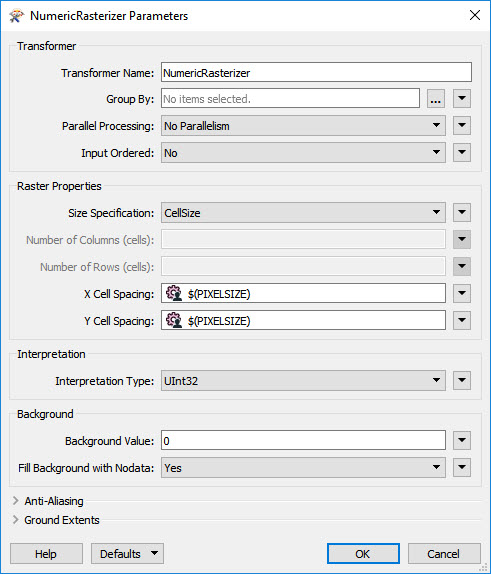
- 现在,我们将使用NumericRasterizer。修改参数,将Size规格设置为“CellSize”,将X和Y单元格间距设置为用户参数“PIXELSIZE”。解释类型也应该设置为UInt32。该变压器的“栅格”输出可以连接到“栅格”输出变压器。
- 自定义转换器现在已经完成。使用转换器的结果将是一个黑白栅格,其中每个像素都有一个值来描述点云密度(像素内的点)。这些值将根据变压器参数下用户定义的像素大小而变化。使用栅格来表示点云密度,可以很容易地看到您感兴趣的点云中的区域是否满足进一步项目和操作的需求。例如,是否有足够的地面点来创建一个准确的DEM?








彩色编码点密度光栅
下载
加上一些额外的变压器,我们可以让PointCloudDensityCalculator创建的栅格更具描述性。Gavle市为我们提供了一个城市的点云,我们能够创建这个点云的密度栅格和彩色编码的密度栅格版本,如下图所示:
点云(左),密度光栅(中间),颜色 编码光栅(右)



在下面的演示中,我们将展示如何使用温哥华市的点云创建彩色编码光栅。由于采用了不同类型的扫描系统来收集点,结果显示出与Gavle市不同的模式。要重新创建此工作流,亚搏在线遵循以下步骤:
- 首先添加一个ASPRS读者读取温哥华市的LAS数据集。
- 下一个连接PointCloudDensityCalculator自定义变压器,可从FME集线器下载和安装。该变压器的栅格输出为黑白密度栅格。
- 连接一个RasterBandNoDataRemover到“光栅”输出。这将删除任何没有数据的像素。这样做有助于使处理更快更有效。
- 一个RasterExpressionEvaluator现在可以连接到以前的输出。这种转换器对于创建表示特定像素密度的颜色至关重要。将解释设置为UInt8。这是必要的,因为光栅palletteadder将只用于读取UInt8值。将表达式设置为:
如果([0]= = 0,0,如果([0]< 100,1,如果([0]< 150,2,如果([0]< 200,3,如果([0]< 300 4,如果([0]< 400 5,如果([0]< 500、6、7)))))))
这个表达式创建0到7的值。这些值是根据每个像素的点密度分配的。在这个表达式,如果有0个点/像素,该值被设置为0。如果小于100点/像素,该值被设置为1。如果小于150个点/像素值设置为2,等。如果你想使用不同的点云来完成这个练习,分配给值的密度测量值可能需要更改,以更好地匹配您的点云。您也可以使用更多或更少的值(例如。更多或更少的颜色)如果你想要。
- 连接一个AttributeCreator到光栅expresionevaluator的“结果”。这个转换器用于定义我们将分配前面设置的值的颜色。要做到这一点,在名为“_palette”的参数中创建一个新属性。打开属性值的文本编辑器并输入:
RGB24
0 255,255年,255
255年10,0
2 255年,127年,0
3 255年,255年,0
4 127年,255年,0
5 0,255年,0
6,180年,60
7 0,One hundred.0
第一行表示我们正在为_palette属性分配颜色值。如果值为0(0个点/像素),那么颜色就是255,255,255,也就是白色。这种分配颜色值的模式继续下去。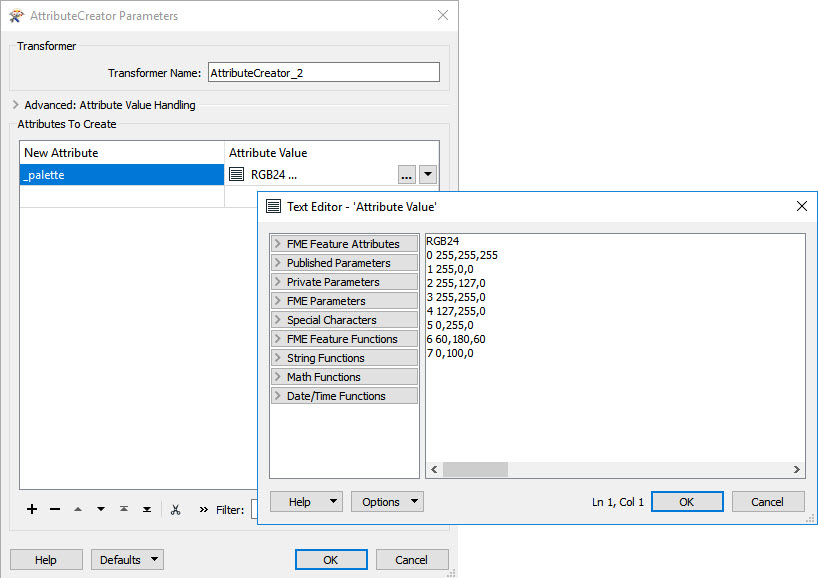
- 从AttributeCreator输出连接aRasterPaletteAdder。Palette属性应该设置为“_palette”。这是为像素分配颜色的最后一步。
- 现在,通过将检查器连接到“output”端口,可以在数据检查器中查看光栅调色板teadder的输出。结果应该与下面最右边的图像类似。

由于使用的激光雷达扫描系统的类型不同,该演示结果与Gavle市的情况有所不同。我们仍然能够更清楚地看到点云密度是高还是低。
点云(左),密度光栅(中间),颜色编码光栅(右)



要了解更多关于为栅格添加颜色的信息,请访问我们的文章光栅计算和光栅调色板。
数据属性
- 此处使用的数据源自温哥华的城市,不列颠哥伦比亚省。它包含在开放政府许可下的信息-温哥华。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}