介绍
在收集点云数据时,为每个点分配各种组件,包括坐标、强度和分类。在建立曲面模型时,利用点分类可以快速、方便地识别出地面点,从而提取出曲面模型。在下面的示例中,我们将演示自定义转换器如何调用PointCloudLASClassifier由安全的软件团队成员创建的亚搏在线模型可以在工作流中用于创建DEM或TIN模型。亚搏在线
自定义transformer PointCloudLASClassifier可以通过提取地面点来提高DEM或TIN输出的精度。如果您正在处理的点云数据没有分类组件,那么可以使用shapefile删除非地面点,比如建筑物。这文章解释如何做到这一点。
1.按等级划分制作DEM
下载
为了沿着点云边缘生成正确的高度,必须考虑所有相邻的点云块。但是,为中心瓦片和所有相邻瓦片生成单个数字高程模型(DEM)会显著影响性能。为了减少总体的数据量,我们可以在中心点云块周围生成一个相对较小的缓冲区,并用这个缓冲区来修剪相邻块的边缘。生成的点云(中间的瓦片与相邻瓦片的边缘)用于制作DEM栅格,然后将栅格裁剪到中心瓦片的原始范围。
一个。 b。
b。
一个形象。显示原始点云数据,并选择感兴趣的中心平铺。图像b。是下面从LAS到DEM工作流程的最终DEM输出。亚搏在线
dem是代表地球表面的常用模型。它们是基于栅格的模型,单元格值表示不同的海拔高度。由于每个单元是一个表面区域海拔高度的平均代表,自然景观看起来是平滑的,而人工景观看起来是粗糙的。使用FME从LAS数据创建DEM是快速和简单的,因为您可以只使用地面分类点来创建模型。
点云中的点有一个称为分类的组件。组件中的代码值表示类,如建筑物或地面。为了创建一个DEM,我们只需要地面类。从点云创建DEM的步骤如下:
- 添加一个LAS读者将点云文件添加到工作区。从文件浏览器中为reader数据集选择所有必需的文件。
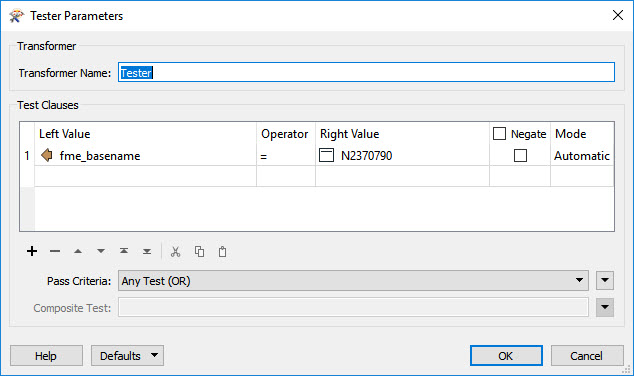
- 将中间的块与相邻的块分隔开测试仪通过将fme_basename的Test子句设置为等于中心平铺文件名。
- 将“通过”的点(中心平铺)连接到aBufferer。在我们的例子中,我们将使用一个200米的缓冲量。
- 使用限幅器,将缓冲后的点云作为“剪切器”,将测试者的“失败点”(相邻的点云块)作为“剪切器”。这将导致来自相邻瓦片的点的集合,这些点距离中心瓦片边缘的边界200米。
- 使用PointCloudSplitter使用来自测试人员的“通过的”点(中心块)和来自Clipper的“内部”点(相邻块的点)的输入,通过分类来分割点云。确保“Output属性”设置为“_classification”。这对于下一步中的自定义转换器能够理解数据是必要的。
- 定制的变压器PointCloudLASClassifier现在可以通过将PointCloudSplitter中的“分割”点连接到输入端口“LAS_Point_Cloud”来使用。这个自定义变压器将以2(接地)的分类来识别这些点。
- 将“地面”点连接到“点/线”中RasterDEMGenerator创建一个DEM。设置参数,使表面公差设置为0.0,输出DEM X和Y的单元格间距均设置为2。
- 使用另一个Clipper转换器,将“通过”的测试点(中间的平铺)连接为“Clipper”,将“DEMRaster”连接为“Clippee”
- 添加一个USGS_DEM作家并将第二个Clipper的内部输出端口连接到它,得到最终的DEM。将坐标系设置为“UTM83-16”。将DEM文件定义更改为“Manual”,以便能够设置文件名。

可选:尝试在没有从PointCloudLASClassifier转换器到RasterDEMGenerator的链接的情况下运行工作空间,而是从PointCloudSplitter连接“分割”点。比较不同的输出DEMs。
一个。 b。
b。
一个形象。显示在工作流中使用所有点创建DEM时DEM输出的样子。亚搏在线图像b。是DEM的外观时,仅使用地面分类点等。仅使用地面分类分在接地本身的更加顺畅和现实表现。
如果使用其他的LAS文件来生成一个DEM,检查这些点是否带有分类。如果是,确保只使用适当的类来生成DEM。
2.按班分班制罐头
下载
当点云具有分类组件时,就可以获得创建建筑物表面模型的最佳结果。我们可以使用数据检查器PointCloudPropertyExtractor以检查该组件是否存在。如果点云有一个2级分类,地面,它往往足以产生表面。然而,排除建筑物仍然可以帮助做出更精确的模型,因为它可以帮助避免分类错误。这文章解释更多关于分裂点云的类。该工作区的步骤如下:
- 添加一个ESRI Shape文件阅读器为建筑占地面积文件和LAS读者对于LAS文件。
- 建筑占地面积文件连接到Bufferer为5的缓冲量。
- 使用溶解与缓冲的shape文件默认参数。
- 连接LAS文件到PointCloudSplitter并通过“最后只返回”(在参数进行更改)拆分。
- 添加限幅器变压器和连接溶解shape文件为“快船”和分割点云“Clippee”。这将点云落在建筑物轮廓内,使它们不会被包含在DEM代内取出点。
- 从快船“外”输出连接到PointCloudSplitter。更改的参数通过分级来分割点云。
- 添加自定义变压器PointCloudLASClassifier和“分割”点连接到“LAS_Point_Cloud”输入端口。
- 添加SurfaceModeller变压器为1的“表面容差”,并从输出端口“2-接地”的点连接到输入端口“积分/线”。
- 添加一个RasterInterpretationCoercer从SurfaceModeller输出“DEMRaster”连接到它。该变压器的“解释”参数应该有“目标解读类型”设置为RGB24。
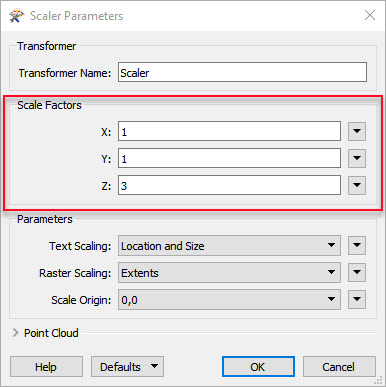
- 添加一个定标器和输出端口“TINSurface”连接到它。定标器参数应该是X:1,Y:1,Z:3。
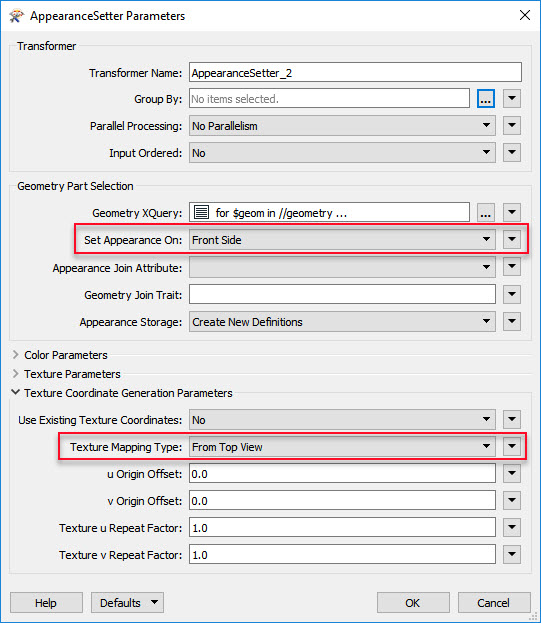
- 添加AppearanceSetter变压器和从RasterInterpretationCoercer连接“输出”到“外观”和“缩放”,从定标器,以“几何”。该AppearanceSetter参数应该“设置外型上”为“正面”和“纹理映射类型”设置为“从顶视图”
- 从“输出”端口,您可以添加一个作家写你的锡(我们写它作为3D PDF)


这个工作空间的输出更加平滑。注意,桥梁已经从模型中消失了。这意味着他们有其他的分类而不是根据:

这个工作空间使用DEM作为纹理生成一个TIN(一个3D PDF文件):

数据属性
- 这里使用的数据来自经提供数据起源俄亥俄州地理参考信息计划。地理信息系统支持中心保持企业和站点许可证用于商业数据集都支持俄亥俄企业。
@heikal这很难不看你的数据/工作区说。请注意,工作区是瓷砖读,然后做对他们的工作区中的一些处理。你也读瓷砖?是否日志报告任何错误/警告?我们有一个调试指南,应该帮助https://knowledge.亚搏在线safe.com/articles/19301/root-cause-analysis-guide.html
嗨,您好
我想你的拉斯维加斯到DEM和我“翻译是成功的1个警告(0功能(S)输出)
FME会话持续时间:3分钟52.7秒。(CPU:1489.6s用户,1.1s系统)
END - 的ProcessID:5428,峰值进程的内存使用量:1322008 KB,当前进程的内存使用:50552 KB
翻译是成功的”
但是,我不能显示的结果,有什么建议?
问候
你好@heikal日志是说你有“0部件输出”。有在您的工作需要连接的变压器,也没有它们的属性设置。我建议删除一切,但RasterDEMGenerator,看看是否能工作,在最低限度。如果您仍然有问题,请您的工作区和源数据发送给我们的支持团队https://support.亚搏在线safe.com/knowledgeSubmitCase