使用FME桌面2018.0创建的文章
介绍
不费吹灰之力,我们可以将光栅中的颜色应用到点云,以获得比简单着色更有趣的结果。下面的练习将展示如何做到这一点,以及如何进一步操纵颜色值以突出感兴趣的特征。突出显示颜色以外的组件(如强度或等级);以及如何将特定组件设置为常量值。

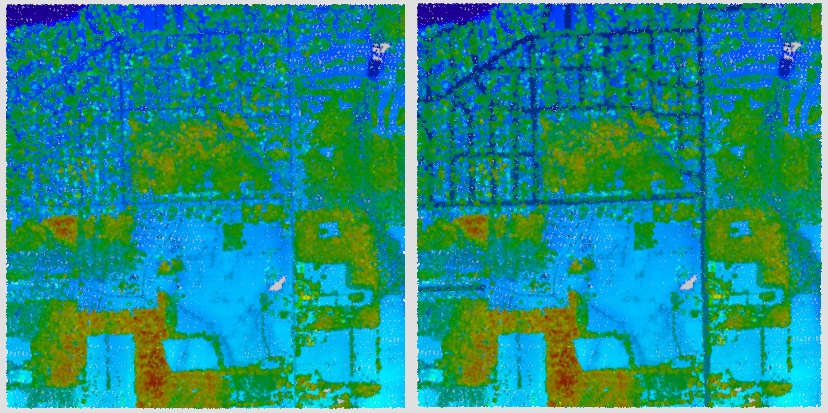
上面的图片显示了一个没有颜色操作的点云(左),以及与正射影像(右)中的颜色相同的点云。
1。突出道路走廊
下载
要突出显示道路走廊等功能,需要点云,正射影像,以及相关的特征数据集。在这个例子中,我们将描述如何使用道路数据集实现这一点,其中表示道路走廊的点云的点比点云的其余点云更亮。下面是工作流的图像,用于帮助希望使用原始数据重新创亚搏在线建此流程的人员

步骤如下:
- 添加一个LAS,ESRI形状文件,和蜥蜴科技公司点云阅读器,形状文件,分别使用默认参数和正射影像文件。
- 添加一个剪刀具有LAS读卡器功能类型的变压器连接到“clipper”端口,而道路形状文件读卡器功能类型连接到“clippe”端口。
- 将剪辑器的“内部”输出连接到缓冲器变压器。将参数“缓冲量”更改为25。这将定义道路走廊的范围。
- 添加第二个裁剪器并将“缓冲”输出连接到“裁剪器”。将mrsid正射影像阅读器功能类型连接到“clippe”。
- 添加一个RastereExpressionEvaluator公司变压器并将第二个钳子的“内部”输出连接到“A”输入端口。设置波段表达式,如下图所示。表达式中添加了三种“保留”解释:
“A[0]+80”
“A[1]+80”
“A[2]+80”
这些表达式将增加定义的道路走廊的亮度(我们可以对颜色进行任何更改,例如,让它变暗,或者提高红色和蓝色)。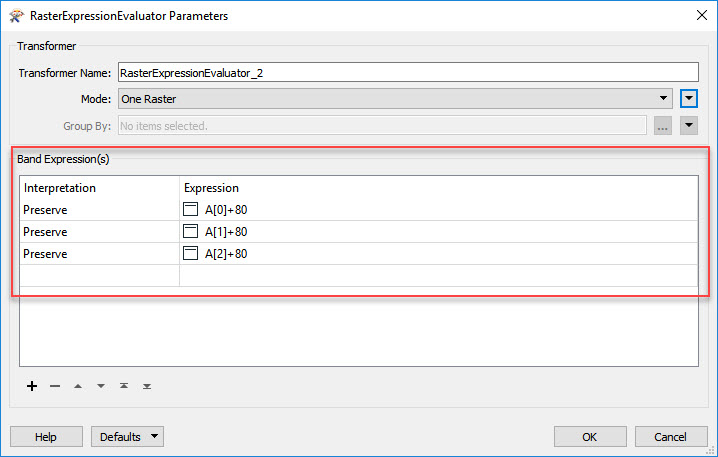
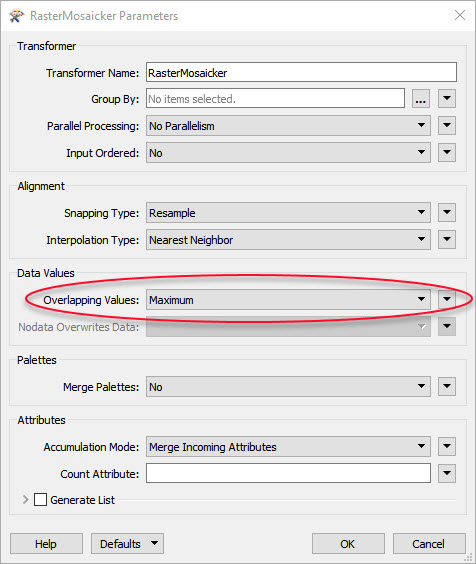
- 添加一个拉斯特莫塞克变压器。将正射影像阅读器功能类型和RasteExpressionEvaluator的“结果”输出连接到输入端口。将“重叠值”参数更改为“最大值”很重要。当正射影像被剪断时,不需要的部件变黑而不是消失。将重叠值设置为最大值将确保保留指定的亮度值,并且正射影像的原始颜色将替换黑色区域(任何颜色都将高于黑色,因为黑色的带值为0,0,0)。
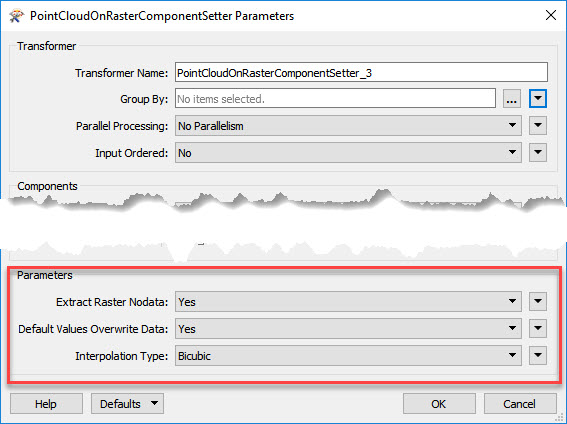
- 添加一个pointcloudonrastercomponentsetter将参数“提取光栅节点数据”设置为是,“默认值覆盖日期”为“是”,“插值类型”为“双三次”。将Rastermosaicker的“输出”连接到“光栅”,将LAS读卡器连接到“点云”输入。
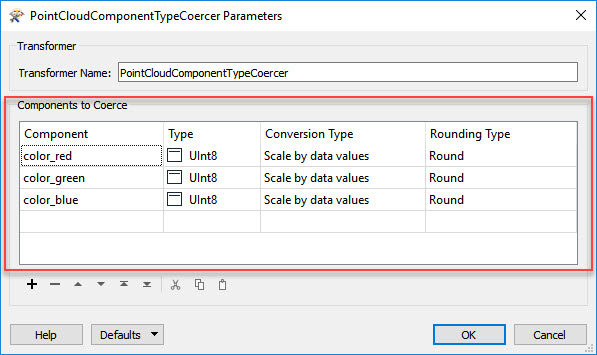
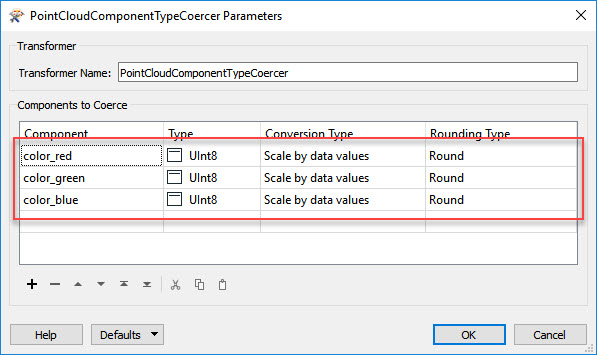
- 添加变压器点云组件类型强制并将参数设置为下图中所示的参数。增加了三种成分:红色,颜色是绿色和蓝色。对于这些组件中的每一个,“type”设置为“uint8”,“转换类型”设置为“按数据值缩放”,“舍入类型”设置为“舍入”。将前一个转换器的“pointcloud”输出连接到输入端口。
- 您可以将检查器附加到“输出”端口,以查看带有突出显示道路走廊的结果点云。下面的图片显示了点云在常规正射影像着色(左)下的外观,以及在突出显示道路走廊(右)后的外观。






2。道路走廊强度变化
下载
默认情况下,pointcloudonrastercomponentsetter将值从基础光栅传输到点云。我们可以自定义工作流,将光栅值设置为任意点亚搏在线云组件。在这个例子中,我们将只使用道路中心线创建光栅,然后通过点云组件强度突出显示道路走廊。
步骤如下:
- 添加一个LAS和ESRI形状文件LAS和道路特征文件的读卡器。参数可以保留为默认值。
- 添加一个剪刀转换并将LAS读卡器连接到“clipper”端口,将roads shapefile连接到“clippe”。将道路网络裁剪到点云的范围,可以减少不感兴趣的处理道路。
- 添加一个缓冲器变压器和连接“内部”钳输出到输入端口。将参数中的“缓冲量”设置为40。缓冲区结果定义道路走廊。
- 添加变压器3力并将“高程”参数设置为10。将“缓冲”输出连接到输入端口。该变压器将调整道路走廊的强度,使其在产生的点云中更明显。
- 现在添加数字放大器变压器和连接3dforcer输出到输入端口。在“光栅属性”下的参数中,将“列数”和“行数”设置为5000。同时将“解释类型”设置为uint8。
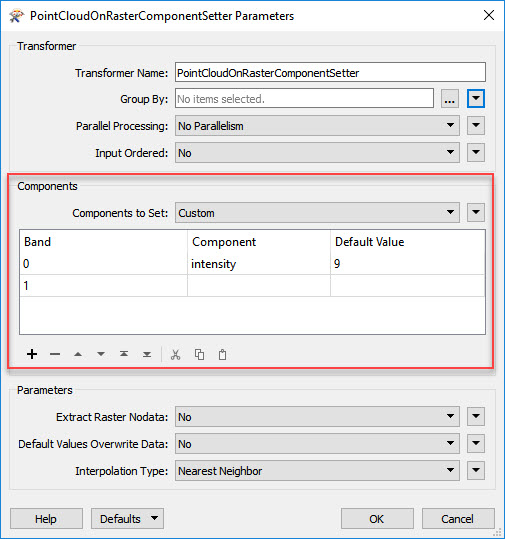
- 要覆盖点云和新创建的光栅,请添加pointcloudonrastercomponentsetter变压器。将LAS读卡器连接到“点云”和“光栅”,从数字转换器连接到“光栅”。将“组件”参数设置为“自定义”,并添加波段信息,如下图所示,在添加波段0时,“组件”设置为“强度”,“默认值”设置为9。
- “point cloud”端口可以连接到检查器,以在数据检查器中查看带有强调道路的新点云。结果应该像下面右边的图片。


三。基于正交颜色的点云再分类
下载
如果我们有能够为我们提供某些领域分类信息的数据集,pointcloudonrastercomponentsetter是更改点的类的一个有用的转换器。例如,如果我们有建筑足迹,我们可以将点分类设置为6(即根据ASPRS分类的“建筑物”)。有时给点云中点的分类值是不正确的,因为它们是基于算法的。这个例子演示了我们如何使用正射影像中的像素值纠正地面(2级)和低植被(3级)之间的错误分类。下面是工作流的图像,用于帮助希望使用原始数据重新创亚搏在线建此流程的人员。

步骤如下:
- 添加一个LAS和蜥蜴科技公司分别具有las和ophoto文件的默认参数的读卡器。
- 添加一个pointcloudonrastercomponentsetter转换并将LAS阅读器连接到“点云”,将正射影像连接到“光栅”。这将用正射影像的颜色重新给点云上色。保留默认参数。
- 添加变压器点云组件类型强制并将参数设置为下图中所示的参数。将前一个变压器的“pointcloud”输出连接到输入。
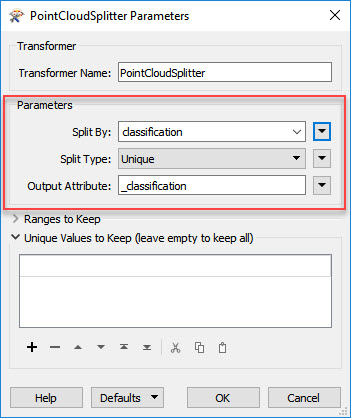
- 使用点云拆分器变压器将点云按类别划分。参数应该如下图所示。将前一个“输出”端口连接到输入端口。
- 添加一个测试器变压器将接地点与点云的其余部分分开。将“拆分”输出连接到测试仪输入,并更改参数以匹配下图。导致“通过”输出的点将表示地面点(分类为2),“失败”输出将表示其余点(主要是建筑物和植被)。
- 在使用点云前进之前,我们必须对正射影像做一些改变。添加Rasterbandnoda去除剂并将MRSID读卡器功能类型连接到输入端口。
- 添加一个RastereExpressionEvaluator公司变压器并将先前的“输出”连接到“A”输入端口。更改参数中的带区表达式,如下图所示,其中表达式为if(a[1]-a[0]>=7&&a[1]-a[2]>=7&&a[1]<150,3,2)。此表达式将绿色着色像素的分类设置为3,其他颜色为2(地面)。
- 添加另一个pointcloudonrastercomponentsetter,并将“通过”(接地点)从测试仪连接到“pointcloud”输入。将RasteExpressionEvaluator中的“结果”(像素带有类2和3)连接到“光栅”输入。将参数中的组件设置为下图中所示的组件,其中添加带0时,“组件”设置为“分类”,“默认值”设置为2。这将细化点云。如果光栅和点云匹配以将点分类为2,它将保持为2。如果光栅和点云不匹配,而光栅将点分类为3,然后该点将从2(地面)变为3(低植被)。
*注意,对于这种转换,“插值类型”选项应设置为“最近邻”,否则,变压器可以为点指定插值(中间)值。例如,如果我们使用值为1和3的光栅,转换器可以将一些点云值设置为2。 - 添加点云合并器将测试仪的“失败”输出端口和pointcloudonrastercomponentsetter的“pointcloud”输出转换并连接到pointcloudcombiner的输入端口。
- 该变压器的输出看起来与原始点云相同,但地面和低植被点的分类值将更加准确。
- 我们也可以将一个类突出显示为一种颜色,以强调该功能。我们对3级(低植被)进行了这项研究。添加另一个pointcloudsplitter并将pointcloudonrastercomponentsetter的“pointcloud”输出连接到输入。再一次,按分类划分。
- 添加另一个测试仪,只提取分类为3的点。
- 添加一个RasterrgbCreator公司转换并将参数中的“列数”和“行数”更改为1。
- 添加另一个pointcloudonrastercomponentsetter。将测试仪中的“传递”点连接到“点云”,将“创建的”光栅连接到“光栅”。将参数设置为下图中所示的参数,其中“分量”设置为“颜色红”,“默认值”设置为127,将“分量”设置为“颜色绿”,“默认值”设置为189。第2波段加上“组件”设置为“蓝色”,“默认值”设置为63。
- “PointCloud”输出可以在数据检查器中查看。3级(低植被)的点将显示为亮绿色。下面的图片显示了原始点(左)和点云,以及亮绿色低植被像素(右)。









数据属性
- 这些练习的数据来源于俄亥俄州地理参考信息计划.GIS支持中心为支持俄亥俄企业的商业数据集维护企业和站点许可证。