- 上一篇:点云三维地形模型建筑
- 当前:从3D模型或栅格数据创建点云
介绍点云的创建
虽然您可能已经熟悉了lidar派生的点云和FME快速转换点云数据的能力,但是您可能不知道FME还可以从其他几何图形创建点云。如果您希望执行操作或创建原始格式不支持的模型,这种转换可能非常有用。在下面的演示中,我们展示了如何将3D模型(如Sketchup)和栅格(如DEMs或RGB图像)渲染成点云。
本文中要强调的转换器是PointCloudCombiner,它可以从输入几何图形输出单点云。在下面的每个示例中,我们将进一步了解它的用法。
下载
例1:点云的3D模型
工作区模板:3dmodel2pointcloud.fmwt
在这个例子中,PointCloudCombinertransformer用于将Sketchup模型中的3D特性转换为点云。打开workspace模板查看完成的工作流,或者按照下面的步骤创建您自己的3D模型来指向云工作流亚搏在线。
第1步。阅读源三维模型
为源3D模型添加一个Sketchup阅读器。检查数据,这样您就会知道您在处理什么。

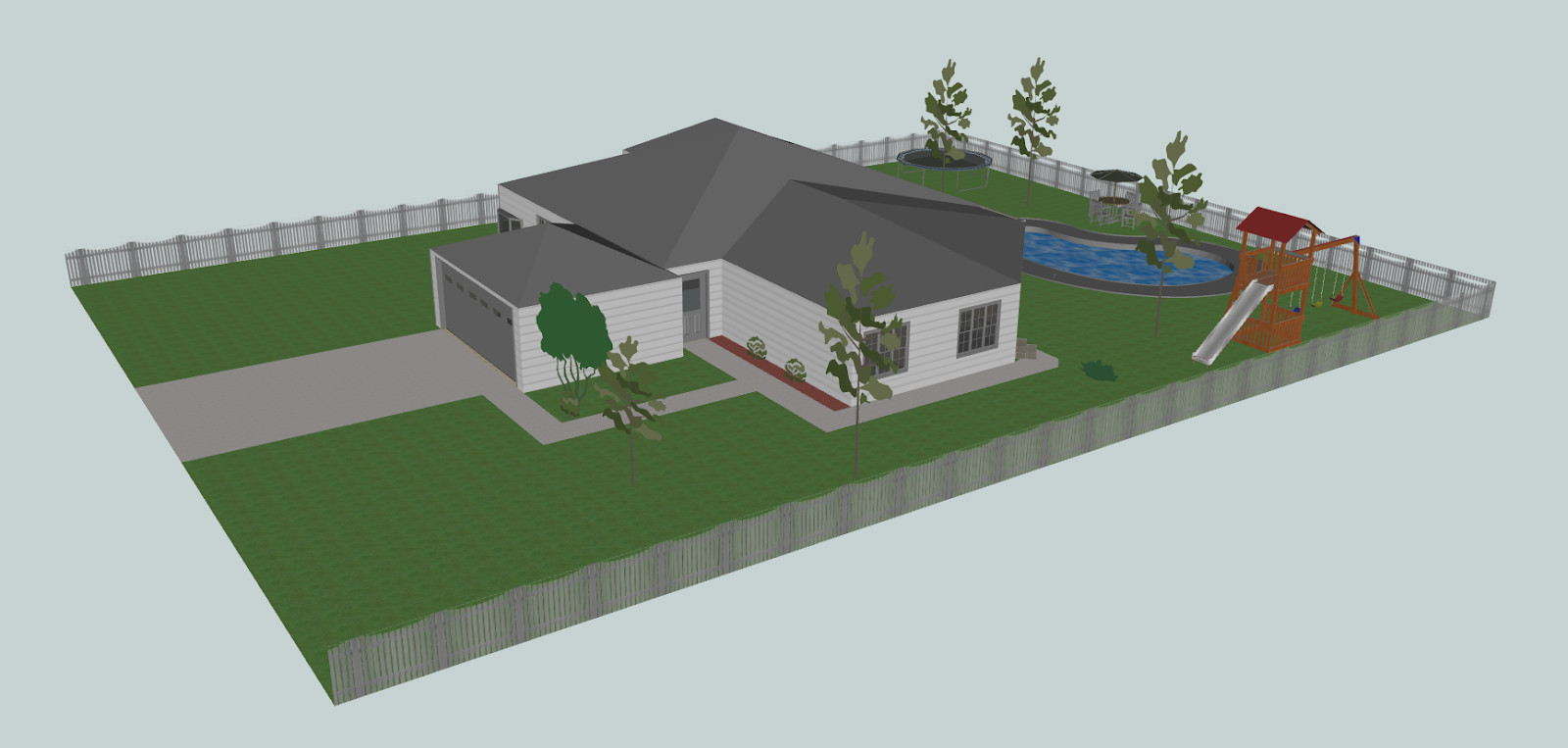
下面就来看看包含在工作区模板的SketchUp模型:
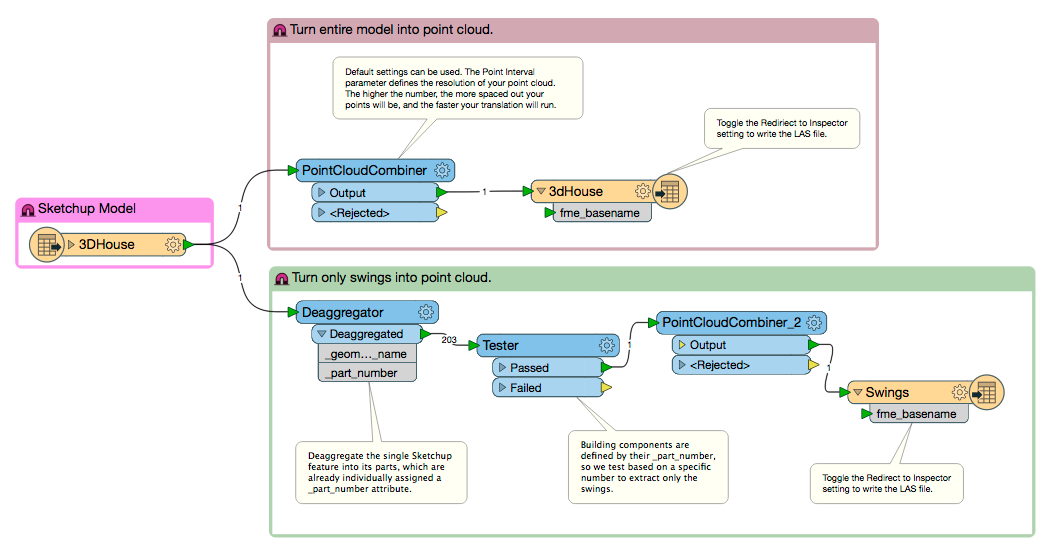
第2步。转换整个模型三维点云
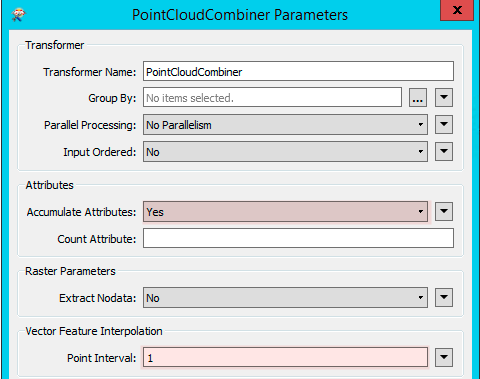
的PointCloudCombiner用于将整个模型转换为点云。这是工作空间模板中的上部书签。在这种情况下,可以使用默认设置,因为我们只是想积累类似的属性,并以1个单位间隔分隔输出点。改变了点间隔参数PointCloudCombiner可以对处理时间产生巨大的影响,但如果需要,还可以提供更细粒度的内插。
请注意:当运行工作区提供的,你可能会看到以下错误:
|警告|间距参数给定会产生非常多的网格点,考虑增大间距
这个警告是为了提醒您,您的计算机可能需要一段时间才能与您当前的设置运行。如果你觉得时间太长,只需调整点间隔参数数量较多,再试试吧!
第3步。转换的3D模型的一部分,以三维点云
的解聚合和测试仪变压器可以用来提取特定的特征,转换为点云。每个组成Sketchup聚合模型的部分都有一个_零件号属性,其作用类似唯一标识符。对于模板中提供的模型,a_零件号其中7个过滤掉了swing集,我们可以将其作为单独的点云特性输出,如工作空间模板中较低的书签所示。
下面是完整的工作区是这样的:
下面是由工作区的下部的输出摆幅集:

我们已经成功地将一个3D SketchUp模型转换成点云,并展示了如何以点云的形式分离源模型的特定部分。运行工作区时,您将注意到LAS writer已被设置为重定向到督察,使检查器在翻译完成后立即打开并显示结果。这可以是一个有用的设置时反复测试高度可视的工作流程,或与旨在被可视化的输出工作时。亚搏在线除了通过作家菜单栏切换此设置,还有一些其他的方法来修改这个设置,你可以阅读更多有关这里。
实施例2:对栅格点云
工作区模板:raster2pointcloud.fmwt
RGB和数字栅格和点云转换
在下面的例子中,我们将着眼于改造和组合两种不同的使用点云栅格。光栅以点云的转换可能是有用的,如果你的翻译作业或输出不能在本地的光栅格式进行,如与独特的颜色的情况下和提升形象,我们将结合我们的航空摄影(RGB光栅)和数字高程模型(DEM数字栅格)下面创建。我们的输出将有三个点云“层”表示一种航空摄影,一个DEM,并从所述两个光栅的组合构成的航空摄影的3D视图。
转换的RGB栅格的点云
以我们上面工作的3D模型,一个RGB光栅转换为点云同样也与实现PointCloudCombiner变压器。点云将有组件对于每个栅格波段(例如红,绿和蓝)。由于我们的RGB光栅不包括任何高度(Z值)的信息,也不会具有Z分量作为点云,并且将是平坦的。这一步在我们的模型制作是严格2D:我们的最终结果的三维信息,将来自DEM栅格,我们将着眼于未来。
转换一个数字栅格的点云
转换一个数字光栅(DEM)到一个点云与PointCloudCombiner变压器将创建一个升高的点云(点云与z分量),并且没有其他部件。相比于转换的RGB栅格的点云,这仅仅是一个3D变换。
亚搏在线
在下面的例子中,RGB的GeoTIFF光栅航空摄影与DEM数字光栅组合以创建彩色和升高的点云,有效地组合2D颜色和3D高度部件成一个单一的点云。打开上面的工作区模板来跟随。
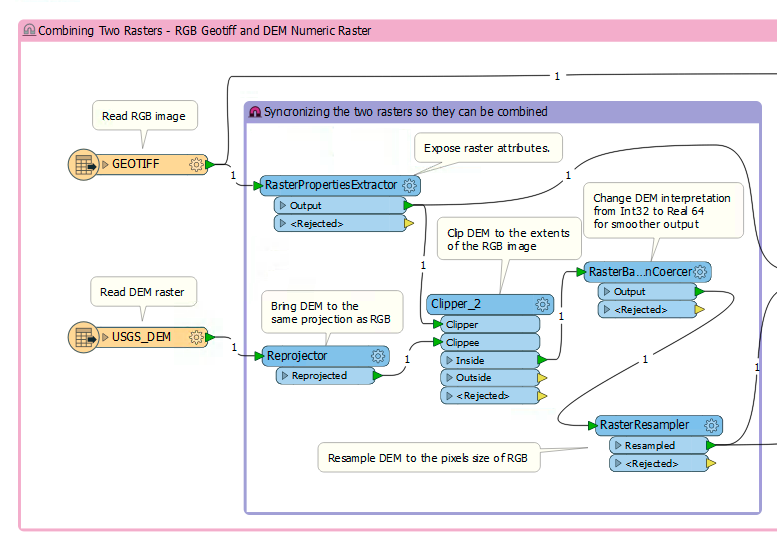
第1步。阅读并同步光栅图像
所述第一系列的步骤同步两个栅格到同一坐标系中,盘区,和分辨率,以便可以将它们组合成四个带光栅R,G,B,Z(参见在工作区中第一个书签和变压器注释)。
这里的工作区,其中两个栅格被设置为组合的第一部分:
第2步。结合输入栅格成一个图像
之后,两个栅格被带到相同的大小以像素为单位RasterExpressionEvaluator将它们组合在一起成为一个四波段栅格由R,G,B和Z的
在所使用的频带的表达式RasterExpressionEvaluator如下图所示:

您可以复制并粘贴从下表中的值:
| 解释 | 表达 | 资源 |
| Red8 | A [0] | 从第一次的GeoTIFF带 |
| Green8 | A [1] | 从第二的GeoTIFF带 |
| Blue8 | A2] | 从第三的GeoTIFF带 |
| INT32 | B [0] | 从DEM首先带 |
这些表达式告诉变压器采取从光栅的GeoTIFF(A)的3个频段的第一三个频带,然后从DEM(B),这将成为第四带采取的第一个频带。还要注意的是,模式设置为两个栅格在这种情况下,因为我们要设置两个不同的光栅合并成一个新的多波段栅格。其中创建的图片无法写入大多数格式,但可以用来创建在最后一步的点云。
第3步。变换4波段图像转换成三维点云
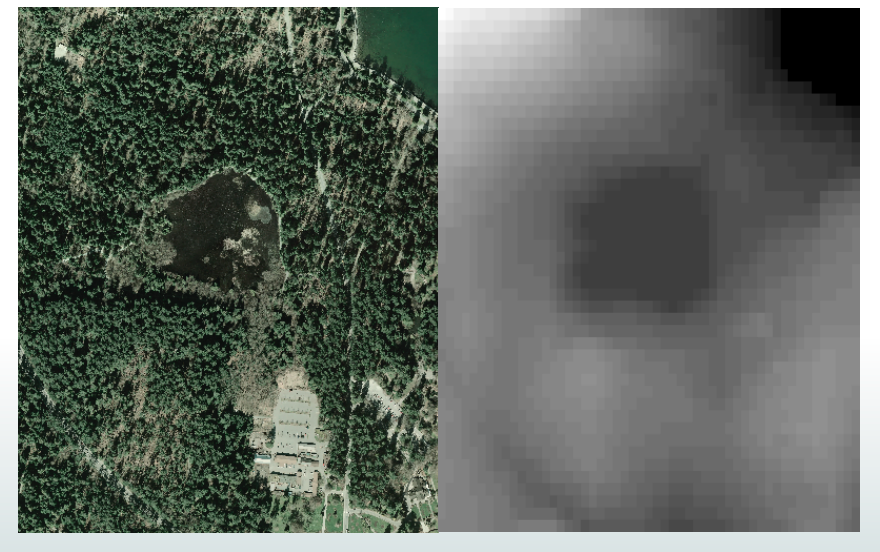
最后,PointCloudCombiner变压器使用具有点间隔的1产生具有点之间1米间隔输出点云。这种变压器只是强求每个栅格的值到一个点云。下面示出的输出是点云具有四个组成部分:R,G,B和Z.因此,该输出是有色的和升高。

包起来
与一些细微的数据操作,这两个演示演示平移与3D组件数据为点云的处理。的PointCloudCombiner是这个过程中的明星 - 关键是在之前进入变压器设置数据,并与之后的点云工作。
数据归属
这篇文章是真的老了,我在2010年或者当我们刚刚添加的点云支持2011写的。
有没有需要上色的3D模型制作点FME - 他们自动获得的颜色,无论是从几何形状或纹理从设置颜色。转换的质量取决于点间隔参数。较高的区间是指较粗的点云用更少点,低间隔给人以流畅的模型,但交易量上升 - 它是由用户来决定他们喜欢什么。处理数十亿的点是FME典型和频繁的目标。
我不太清楚关于你提到的插件 - FME是数据转换与几乎所有的空间或非空间格式工作的一个独立的产品。其主要目的是不数据可视化。我们的可视化工具,数据检查,提供有关的几何形状,属性和组件的深入信息,基本上没有其他工具,将提供更多的信息,但我们不专心的视觉效果多种。
德米特里