介绍
点云数据通过点提供不均匀的覆盖,而光栅图像显示使用像素的区域的完全覆盖。将点云转换为网格栅格可以得到易于使用的大量信息的数据。使用FME,您可以将点云转换为光栅,并通过调整诸如像素分辨率或要显示的点云组件等因素定制光栅图像。下面的练习将带您逐步了解不同的工作流,并解释FME转换器如何在不同的点云光栅转换场景中使用。亚搏在线
1.点云到灰度栅格
下载
这个工作流亚搏在线将重点使用称为intensity的点云组件来创建光栅输出。强度是指在点云数据收集期间物体的反射率或返回的亮度。例如,植被反射率高,返回高强度值;而路面或屋顶反射率低,返回低强度值。如果我们仅使用强度可视化一个点云,我们可以创建一个灰度光栅。
- 添加点云文件和拉斯维加斯的读者使用默认参数。
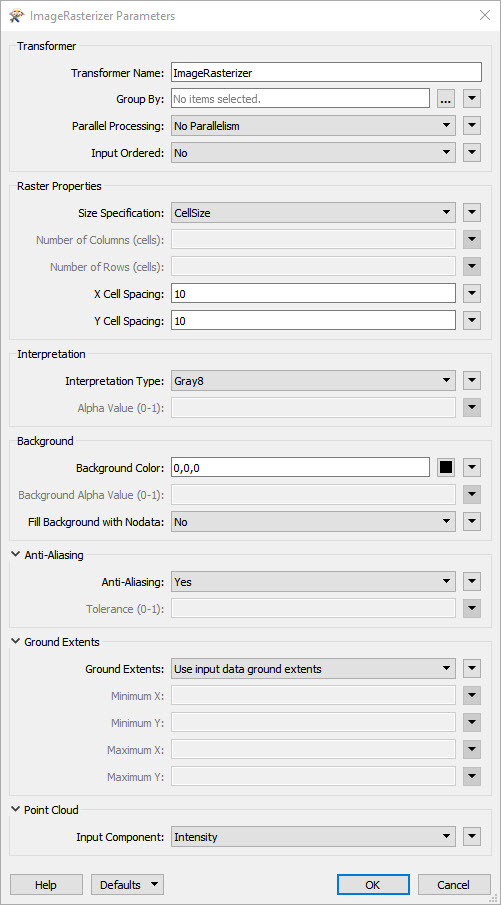
- 添加ImageRasterizer变压器,并将LAS读取器连接到输入端口。应更改参数,以便:
- 尺寸规格:CellSize
- X单元间距:10
- Y单元格间距:10
- 解释型:Gray8
- 背景颜色:0,0,0
- 反锯齿:是的
- 输入组件:强度
- 在这一点上,一个灰度光栅可以创建使用GeoTIFF作家使用默认参数或更多的转换器可以添加到工作流中来进一步平滑光栅,如下面的步骤所示。亚搏在线
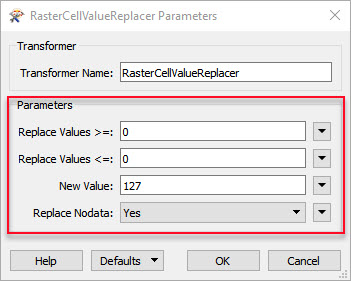
- 将光栅从ImageRasterizer连接到RasterCellValueReplacer下面的图中,“Replace Values >=”和“Replace Values <=”都设置为0,“New Value”设置为127,“Replace Nodata”设置为Yes。这有助于去除光栅图像中的一些噪声。这种平滑算法的缺点是锐度下降,因为我们现在有一个较低的像素值对比度,因为我们已经用127(深灰色)代替了值0(黑色)。平滑效果在有许多明亮像素的区域效果较差,因为它们的值高于127,所以在“洞”和它们周围的环境之间仍然有明显的对比。
- 将前面的输出连接到RasterResampler并将“Size Specification”参数设置为“百分比”,百分比为101,将“Interpolation Type”设置为“Bicubic”。
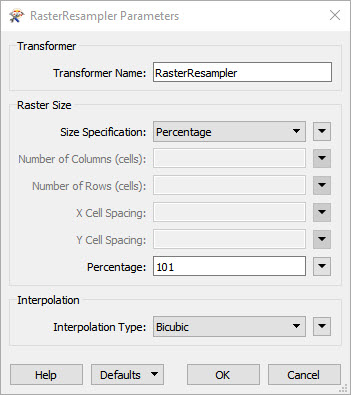
- 复制RasterResampler并粘贴到工作区中。将设置的第二个光栅放大器的百分比从101更改为99.001,并将其连接到第一个光栅放大器变压器。
- 平滑光栅输出现在可以用GeoTIFF写入器使用默认参数写入。将特性类型定义更改为“Manual”。当新视窗出现时,将“压缩方法”改为“压缩位元”,将“光度解释”改为“迷你黑”。



结果是一个灰度图像。下面,从左到右分别是LAS源文件、粗略输出光栅和平滑输出光栅

输出图像通常会有一些没有数据的地方,比如有水体的地方。在我们的例子中,我们有一些没有数据的点,由于点之间的距离大于栅格化的间隔而缺乏覆盖。在下图中,你可以看到没有数据的地方:
如果有很多这样的点或者如果输出主要由NoData组成,考虑使用更大的栅格化间距,比如20m而不是10m(在ImageRasterizer中设置间距)。如果没有数据像素,尝试使用平滑算法,比如使用光栅重采样器向上重采样,然后向下重采样,如上面的步骤5-6所示。模板的工作区。
2.点云到DEM栅格
下载
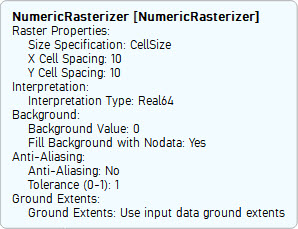
NumericRasterizer使用Z坐标从点云生成DEM。输出将是有效的,只要分配的细胞间距大于可能的不规则间隙在点覆盖。由于点云数据的性质,这些间隙比较频繁,因此我们需要设置10m的大格距来避免DEM覆盖中没有数据洞。我们不能使用平滑,就像我们做的强度在前面的例子,因为它将扭曲表面,使它看起来好像它被陨石击中。
- 添加一个LAS阅读器。
- 只需将LAS阅读器连接到数字光栅化变压器上,即可创建光栅输出。下图显示了我们示例中的数字光栅化器所需的参数。设置“尺寸规格”为“单元大小”,“X单元间距”和“Y单元间距”为10,“公差”为1。尝试将单元格间距从10更改为2,并比较输出。你会发现2米的间距会产生很多空间:
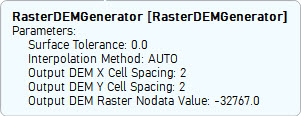
- 用高程光栅化点云的一个更好的选择是SurfaceModeller或RasterDEMGenerator。这两个变形金刚都可以用同样的方式使用,但是表面表情器有额外的能力,如生成轮廓或罐头。在这个例子中,我们选择使用RasterDEMGenerator。光栅发生器与数字光栅发生器产生相同的DEM,然而,它有更多的智能在引子下,并能够插值洞给予更平滑的输出,即使在小的间距。在我们的例子中,栅格demgenerator所需的参数如下图所示。“表面公差”设为0.0,“输出DEM X格距”和“输出DEM Y格距”设为2。
- 运行带有特性缓存的工作区,并检查NumericRasterizer和RasterDEMGenerator的输出。


下图分别为原始点云、数字光栅化器(10米间距)生成的光栅和光栅发生器生成的光栅:



数据属性
- 来自第一个练习的数据来源于由俄亥俄州地理参考信息计划。GIS支持中心维护支持俄亥俄州企业的商业数据集的企业和站点许可证。
- 第二个练习中的数据来源于由西维吉尼亚州的视图。他们是由AmericaView和USGS赞助的。
我试过你的“场景11”。PC2Grayscale”
做得很完美,问题是,我想根据强度用不同的颜色来显示光栅…这是我唯一的点云分类。
我应该改变图像光栅化的transofoemr设置,以获得输出的颜色?
问候,
@heikal强度产生灰度。如果你想要一个彩色光栅作为你的输出,你将需要映射强度到RGB值。请将您的数据和工作空间发送给我们的支持团队,他们将很乐意进一步提供帮助。https://support.亚搏在线safe.com/knowledgeSubmitCase