Introduction
当点云数据集收集,多个分量值的被收集的每个点为好。这可以包括如颜色,坐标,高程,强度和分类信息。虽然点云包含了大量的信息,有时也没有必要拥有这一切。具有处理大量数据集内它是效率低下,耗时仅仅分析单个类型的特征。该PointCloudSplitter变压器是从点的解离休息点云中感兴趣的功能非常有用。
下面的例子演示如何PointCloudSplitter can be used in different scenarios. To learn more about the PointCloudSplitter, visit the文档页面。
通过拆分数回报
下载
当收集的点云数据,激光点向地球发送和反射回传感器。有时是要发送的一个激光脉冲多的回报。这些脉冲进行计数,并给予回报数字。多个反射表面趋向于具有比非反射表面更多的回报。随着PointCloudSplitter,对于如何恢复分割点云四个选项:返回,number_of_returns,首先只返回,或者最后仅返回。下面的步骤演示了如何通过返回点分裂:
- 添加LAS ASPRS读者默认参数,并添加点云数据
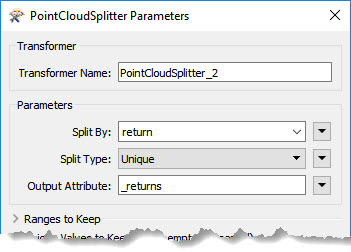
- 添加PointCloudSplitter。在参数方面,集“斯普利特”到“回归”,“分离型”,以独特的和“输出属性”为“_returns”。
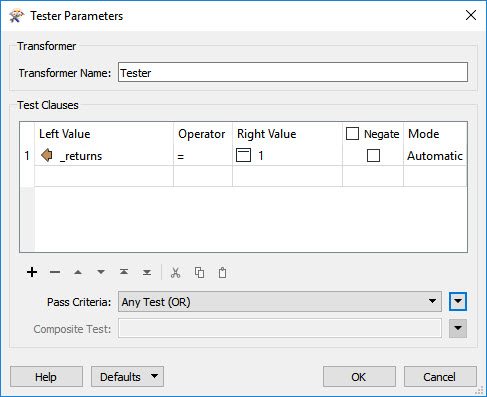
- 最多5返回将通过传感器采集,所以现在我们将添加5Testertransformers, each connected to the Split output port. Each transformer will have the “Left Value” set to “_returns”, “Operator” to = and “Right Value” as either 1, 2, 3, 4, or 5.
- 通过测试仪传递的每个输出可以在数据检查器进行查看。


a. 湾
湾
C。 d。
d。
图像。示出了原始点云读取作为数据查验而图像B中,角,和d的LAS特征类型。分别显示了第一,第二和第三返回点。
通过拆分分类
下载
拆分如果你有兴趣在一个或多个功能,通过一流的点云是非常有用的。分类值是基于标准的ASPRS分类值分配。
Since this type of operation is common, a Safe staff member created a simple custom transformer calledPointCloudLASClassifier使得即使操作更快捷。这是预设知道什么值寻找基本一个大的TestFilter。这意味着你不会有正如前面例子中进行手动添加和设置测试或TestFilter变压器。要使用这台变压器的步骤如下:
- 添加LAS ASPRS读者默认参数,并添加点云数据
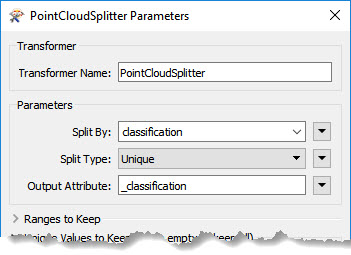
- 添加PointCloudSplitter。在参数方面,集“斯普利特”到“分类”,“分离型”,以独特的和“输出属性”为“_classification”。因为PointCloudLASClassifer设置读取属性“_classification”输出属性必须有这个名字。
- 添加PointCloudLASClassifier。由于这是一个自定义的变压器就必须首先安装。这可以通过下载变压器(以上)来完成,并双击它。安装后,你就可以把它像你将任何变压器添加到工作区。
- 根据类别的点云现在已经分裂,并且可以进一步操作,写为一个新的点云文件,或在数据查验观看。在模板文件中,检查人员只连接到存在于原始的LAS文件中的类。如果您使用的是自己LAS数据集你可能有更多或更少的类。

a. 湾
湾
C。 d。
d。
图像。示出了原始点云读取作为数据查验而图像b的LAS特征类型。示出了归类为地面(2),图像C的各点。示出了分类为高植被(5),和图像d的点。示出了划分为建筑物(6)的点。
通过拆分级和高程
下载
下面的例子是比较复杂的,因为我们将要使用两PointCloudSplitter的和正射影像,以提供额外的着色所得到的点云。根据您的需求,您可能感兴趣的只有某一类点以及如强度,高度,色彩等作进一步的色彩处理另一个组件可以帮助区分重点的差异或地区。要了解如何可以做到这一点,请按照下列步骤操作:
- 添加LAS ASPRS读者使用默认参数并添加点云数据
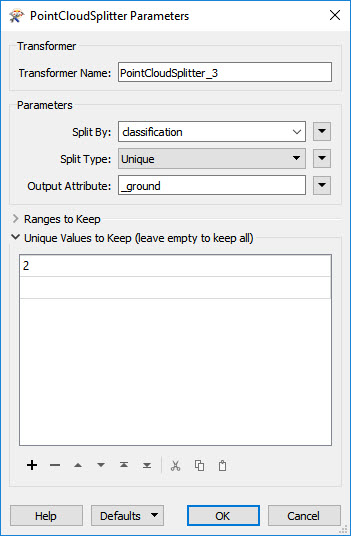
- 添加PointCloudSplitter变压器和更改参数,使“斯普利特”设置为“分类”,“分体式”设置为“唯一”和“输出属性”设置为“_ground”。在“独特价值,以”表中,添加值2这是地面的分类值。这将确保我们从这个变压器只输出是地面点。
- 现在,我们将拆分,我们发现高程地面点。添加第二个PointCloudSplitter变压器和以前的分割点连接到输入端口。更改参数,使“斯普利特”设置为“Z”,“分体式”设置为“范围”和“输出属性”设置为“_z”。z分量代表高程。我们将地面点分成三类:从0到5,5〜20和20〜50。
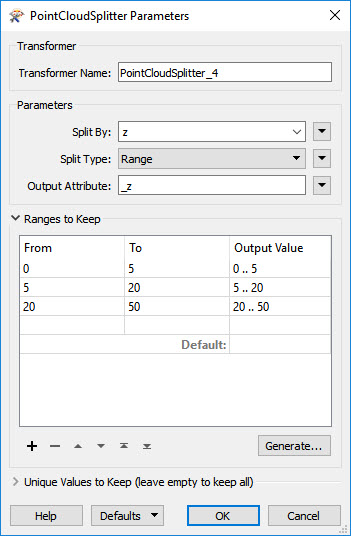
- 现在,我们将添加三个Tester变压器,每一个连接到前一输出。每个变压器将有“左值”设置为“_z”,“操作员”为=和“右值”可能为0..5,5..20或20..50。
- 现在,添加三个新PointCloudOnRasterComponentSetter变压器,一个用于每个测试仪。我们将专注于为PointCloudOnRasterComponentSetter低海拔范围内第一。
- 在这个例子中,我们想通过使用正射影像以色这些点来突出低海拔范围。要做到这一点,重视低海拔测试仪的点云输入。
- 添加读者的GeoTIFFwith default parameters to add the orthophoto. Attach this reader to the Raster input.
- 现在在PointCloudOnRasterComponentSetter, change the Components as being set to “Color”.
- 现在,我们将添加RasterRGBCreator变压器和该连接到栅格输入用于中等和高海拔PointCloudOnRasterComponentSetters两者。
- 对于中等高程PointCloudOnRasterComponentSetter,连接介质标高测试仪输出至点云输入端口。改变参数,使得组件,下有3个频带(0,1和2)与组分COLOR_RED,COLOR_GREEN,和分别COLOR_BLUE。更改默认值75,0和130分别。
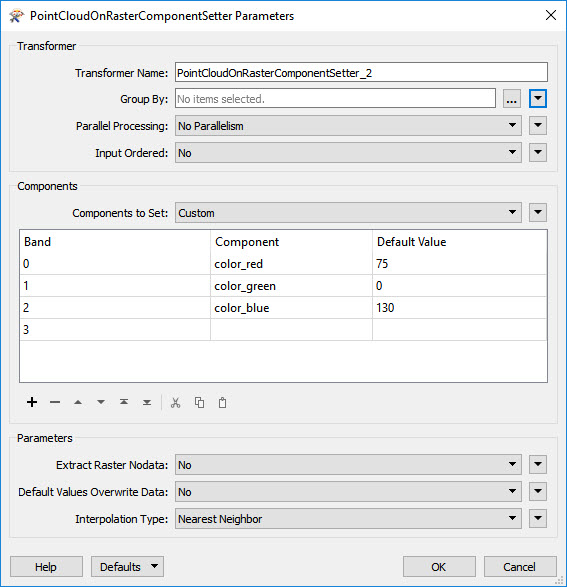
- 对于高海拔PointCloudOnRasterComponentSetter,连接高海拔测试仪输出至点云输入端口。改变参数,使得组件,下有3个频带(0,1和2)与组分COLOR_RED,COLOR_GREEN,和分别COLOR_BLUE。更改默认值至25,25和112分别。
- To put all the changed point clouds together, add thePointCloudCombiner。Keep the default parameters and connect each of the three PointCloud outputs from the PointCloudOnRasterComponentSetters to the input port. You can now use a writer to save the altered point cloud or you can view the output in the Data Inspector.



a. 湾
湾
C。 d。
d。
图像。示出了原始点云读取作为数据查验而图像b的LAS特征类型。shows the ground classified points with z values ranging from 0-5 which were obtained by using two PointCloudSplitter transformers. Image c. shows what the orthophoto of the same area looks like and image d. shows what the result of colour manipulation looks like on the ground classification points.
要了解更多关于变更点云的颜色,请访问我们的文章Colour and Point Clouds。
数据归属
- 这里使用源自从公开数据中的数据由提供温哥华市, 不列颠哥伦比亚省。它包含了开放政府许可协议进行许可信息 - 温哥华。
{kind=link}
谢谢 - 完美,
刚刚回到FME(两年关闭)和点云从机载激光雷达(10岁关:),需要这一个。与PointCloudComponentAdder(添加颜色)组合并Imagerasterizer可视化的2个不同的pointclasses程度在从泰坦的Optech扫描器(地面和河床)的数据集。非常便利。
pH